电动机的选用 选用重点
因AC小型标准电动机、无刷电动机、步进电动机、AC伺服电动机的特性各不相同,选用时要注意的重点(确认项目)也有所差异。
AC小型标准电动机
①负载造成的转速变动
AC小型标准电动机的实际转速受到负载转矩的影响,相比同步转速会降低2∼20%。
选用AC小型标准电动机时必须在发生这种转速降低的前提下选用。
②时间额定
即使是输出功率相同的电动机,因电动机种类不同,其连续额定、短时额定也各不相同。应依据驱动时间(模式)来选用。
③减速机的容许转动惯量
使用减速机与电动机组合,执行瞬时停止(制动器等)或是频繁的断续运行、瞬时正反运行等时,因负载转动惯量过大, 可能造成减速机的破损。因此选用时必须选在减速机的 容许负载转动惯量以下。
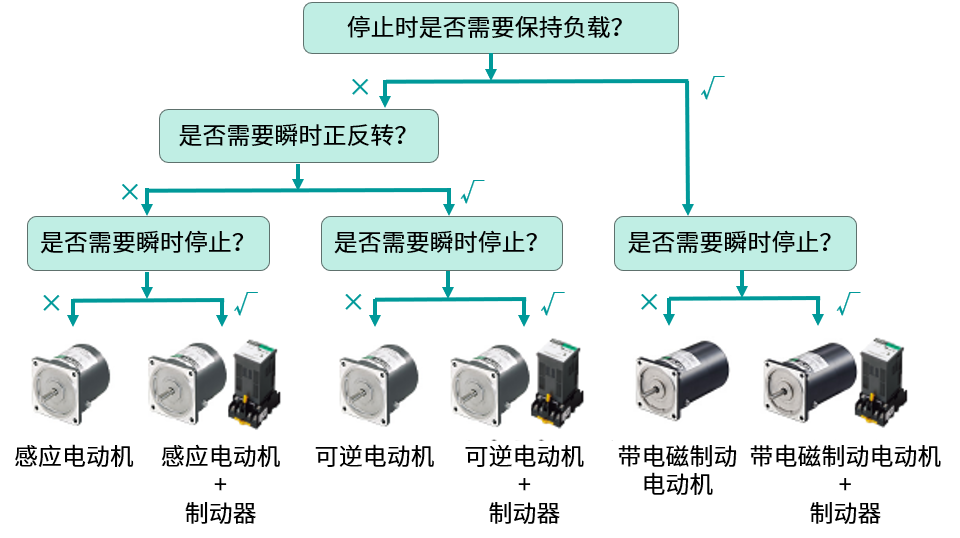
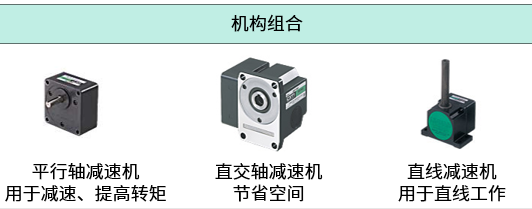
④电动机与减速机的种类选择
-
电动机种类选定流程图
-
减速机的选定
每个电动机系列对应的减速机阵容不同,需要根据选择的减速机系列来确定最终的电动机系列。
无刷电动机
①容许转矩
对于安装了专用减速机的无刷电动机联体型产品,请参考减速机输出轴的容许转矩一览表。请选择负载转矩不超过容许转矩的产品。
②容许转动惯量
无刷电动机为了避免减速时由于再生电力所造成的警报,并且为了实现稳定的速度控制,所以规定了容许转动惯量的数值。请选择转动惯量不超过容许值的产品。
对于联体型产品,如果负载的转动惯量过大,可能会对减速机造成损伤,因此规定了容许转动惯量的数值,请选择不超过该值的产品。
③有效负载转矩
BXⅡ系列在频繁运行、停止时,请勿使有效负载转矩超过额定转矩。超过时,过载保护功能起动,电动机停止。
αSTEP AZ/步进电动机
①必要转矩的确认
选择步进电动机时,在最大同步转矩以内,选用根据运行速度 NM( f2)与必要转矩 TM 表示的运行领域内的电动机。
安全率Sf的参考值
| 对象 | 安全系数(基准值) |
|---|---|
| αSTEP | 1.5~2 |
| 2相5相步进电动机 | 2 |
②对温度上升的考虑
步进电动机长时间连续运行的话,会致使温度上升,超过电动机内部的耐热等级130(B)温度,使得绝缘性能劣化。 随运行速度、负载条件及安装状态等条件不同,上升的温度也会发生变化。请以运行占空比50%以下为基准进行选购。 运行占空比超过50%时,请选择转矩较为充裕的电动机,并采用降低运行电流的使用方法。
③惯性比确认
惯性比按以下计算式计算。
对于减速机型电动机
若步进电动机的惯性比大,则起动、停止时的过冲现象与回冲现象也变大,因而会影响起动、稳定时间。 但是,控制器输出的脉冲信号,其加减速时的脉冲速度为阶梯状变化,剧烈加减速时段差会增大。因 此,若惯性比较大可能导致无法运行。为使得选用的电动机运行更正确,请确认其惯性比在下表的参考值以下。
惯性比(参考值)
| 对象 | 惯性比 |
|---|---|
| αSTEP | 30以下 |
| 2相5相步进电动机 | 30以下 |
若超过表中数值范围时,建议使用减速机型。
AC伺服电动机
①容许转动惯量
为进行稳定控制,AC伺服电动机规定了容许转动惯量。选用AC伺服电动机时,请注意勿使转动惯量超过这一容许值。
| 对象 | 容许转动惯量 |
|---|---|
|
AZX系列 NX系列 |
转子转动惯量的50倍以下※ |
- ※ 自动增益调整时,可进行最多转子转动惯量50倍的运行 ;手动增益调整时,可进行最多100倍的运行。
②额定转矩
只要负载转矩TL与AC伺服电动机的额定转矩之比为1.5∼2以上就能够进行驱动。
③瞬时最大转矩
请确认必要转矩小于AC伺服电动机的瞬时最大转矩。(此时,必要转矩的安全系数 Sf的基准值为以1.5~2为基准。) 此外,请注意能够使用瞬时最大转矩的时间会根据电动机的不同而有 所差异。
| 对象 | 使用时间 | 瞬时最大转矩 |
|---|---|---|
|
AZX系列 NX系列 |
约0.5秒以内 | 额定转矩的3倍时(额定转速时)※ |
- ※AZX系列额定输出功率600W型的额定转矩为3.75倍。
④有效负载转矩
只要有效负载转矩与AC伺服电动机的额定转矩之比,即有效负载安全系数为1.5∼2以上,就能够驱动。
⑤整定时间
相对于使用脉冲信号的位置指令,AC伺服电动机的实际运行会存在延迟。这个延迟差称为整定时间。因此,根据运行模式计算出的定位时间加上该整定时间即为实际的定位时间。
NX系列的出厂时整定时间为60∼70ms。但,使用机械刚性设定开关更改增益参数后,整定时间会发生变化。
选型服务介绍
我们提供简单易用的电动机选型工具,以及由专职人员提供的最优产品选型服务(免费)。
电动机选型工具
只需在网页上输入机构或运行条件,就可以选择产品的工具。从7种机构中,可以选择所有类别的电动机。
委托选型
我们代替客户进行繁琐的负载计算和电动机选型,最短2小时内给出答复。