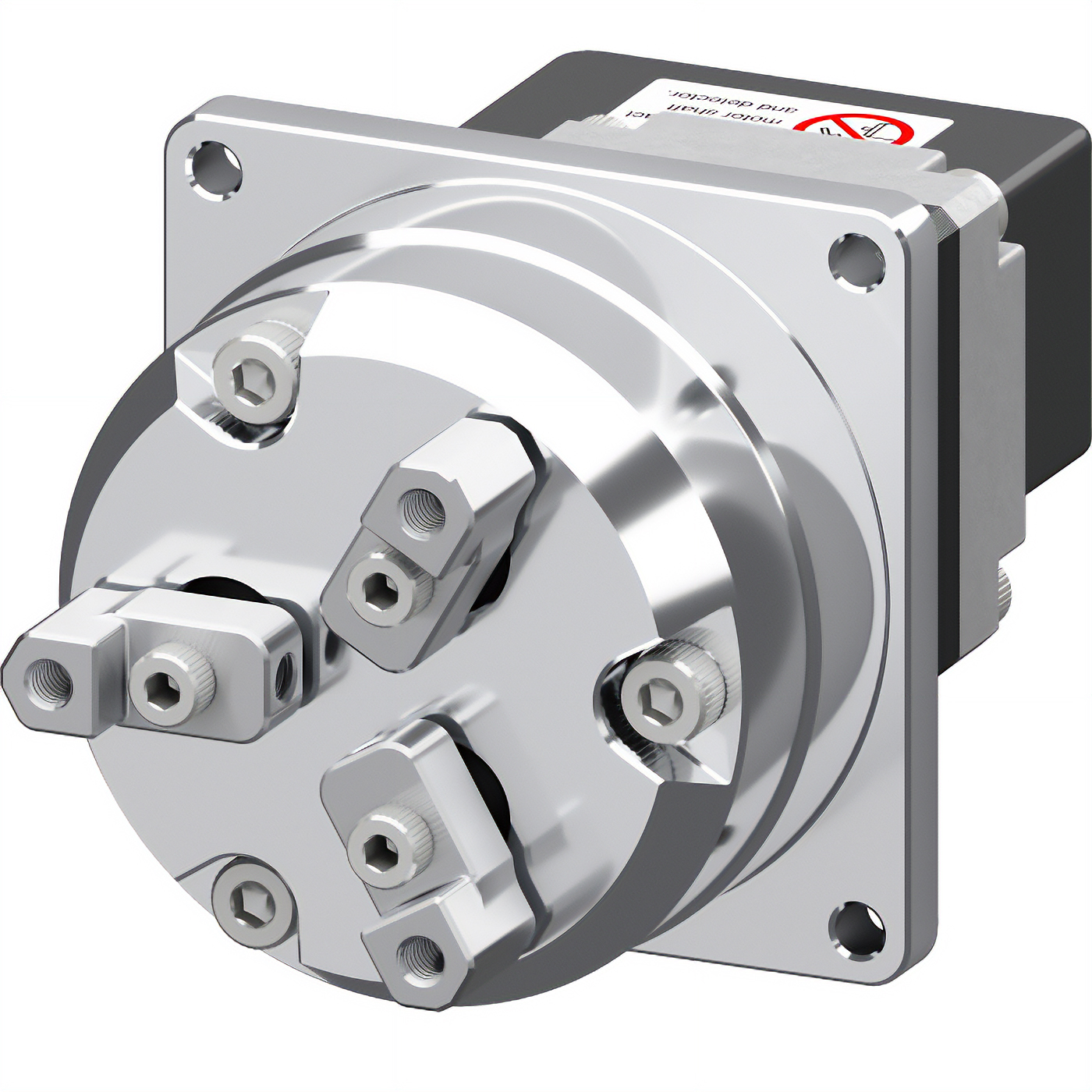
电动夹爪
EH系列
- 实现细致的抓取动作
- 搭载闭环步进电动机
- 备有2指/3指型
- 最大夹持力 50N
特征 | 电动夹爪 EH系列 αSTEP AZ系列搭载
主要特征
针对各种工件,“精细抓取”进行操作
能够以1%为单位设定运行电流,因此可以对夹持力进行细微调整。
抓取
可夹持易损坏、易变形的工件。
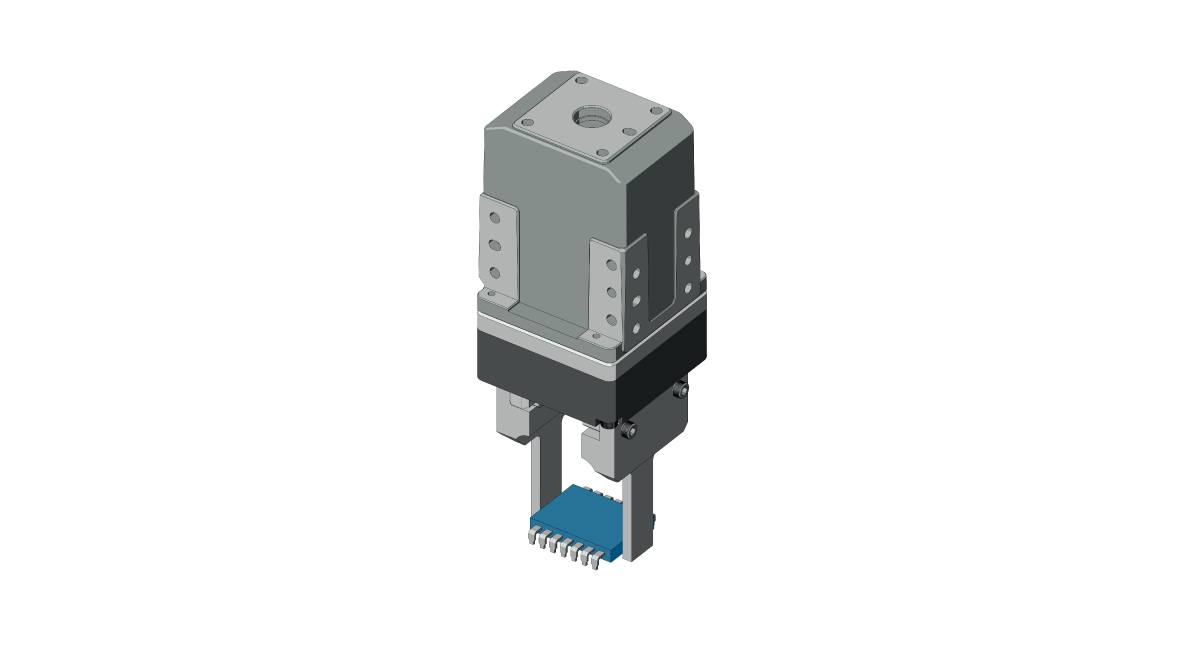
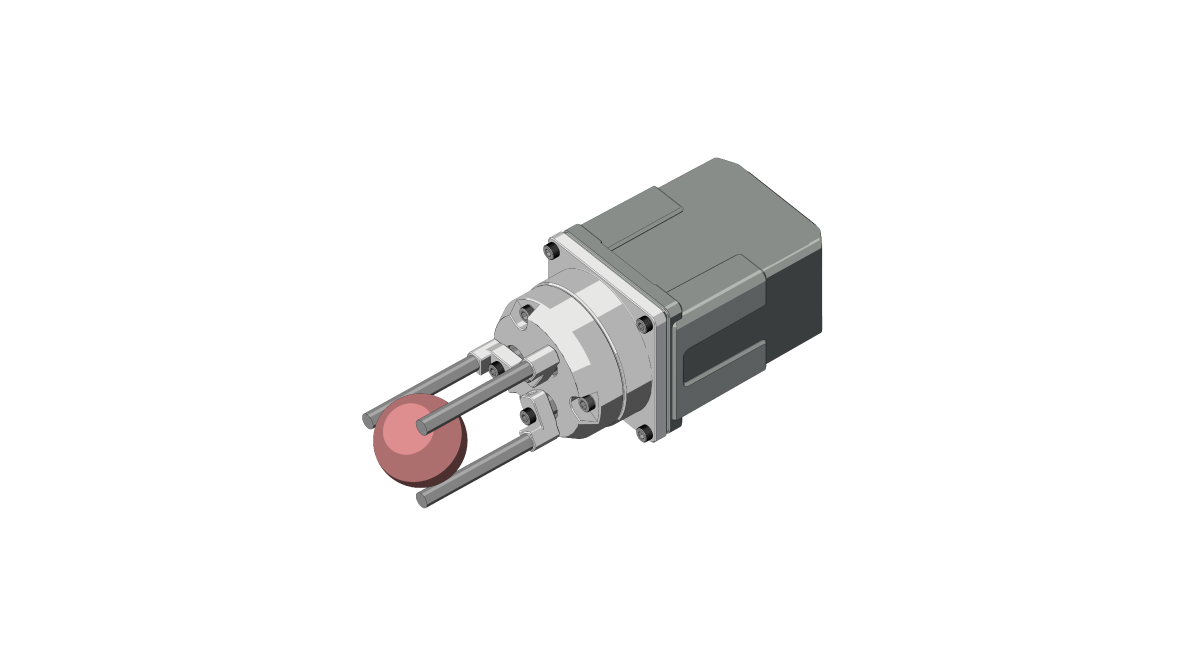
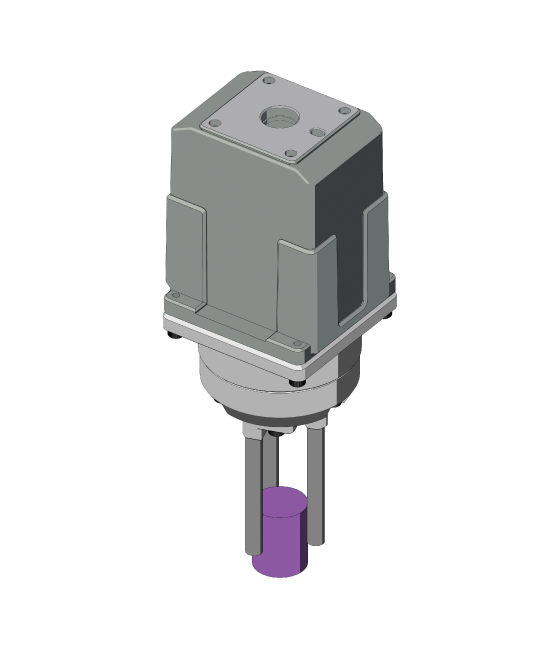
3指型适用于夹持球体、圆形且容易变形的工件。
对齐
可以调整工件的方向和位置。
测量
可以判断工件的大小,测量工件的大小。

越是细致的动作,比起气动夹爪,更推荐使用 EH 系列
以1%为单位调整夹持力(2指・3指)
无需以气动夹爪的调节器(减压阀)进行调整。 夹持力可透过数字设定轻松微调。
以 0.02 mm/s 为单位调整速度(2指)
无需以气动夹爪的调速器(速度控制阀)进行调整。
以 0.02 mm 为单位调整移动量(2指)
此夹爪利用了步进电动机的高定位精度。
基于 ABZO 传感器监视位置(2指 3指)
可监视详细的位置信息。 2指型也可以将位置信息用于判别工件的大小。
依照用途区分使用2指型与3指型
2指型和3指型比较
| 类型 | 2指※1 | 3指 | ||
|---|---|---|---|---|
| 适合夹持的工件形状 |
 |
 |
||
| 可动范围 |
 |
 |
 |
|
| 打开时: P.C.D.Φ30.9mm |
关闭时: P.C.D.Φ7mm |
|||
 |
 |
|||
| 开口宽度: P.C.D.Φ23.9mm |
||||
| 最大夹持力[N] | 25 | 50 | ||
| 允许负载[N] (容许轴向负载[N]※2) |
5 | 15 | ||
| 质量[kg] | 0.38 | 0.38(带安装护盖) 0.28(无安装护盖) |
||
- ※1
- 这些值对应于品名 4 的规格。
- ※2
- 适用于3指型。
3指型的特征
- 由于容许轴向负载较大,因此适用于搬运重量较重的应用。
- 各爪在开合时同时运转。
搭载AZ系列的优势
搭载免电池绝对式编码器
搭载小型的免电池机械式绝对式编码器(ABZO编码器)。 可提高生产力并降低成本。
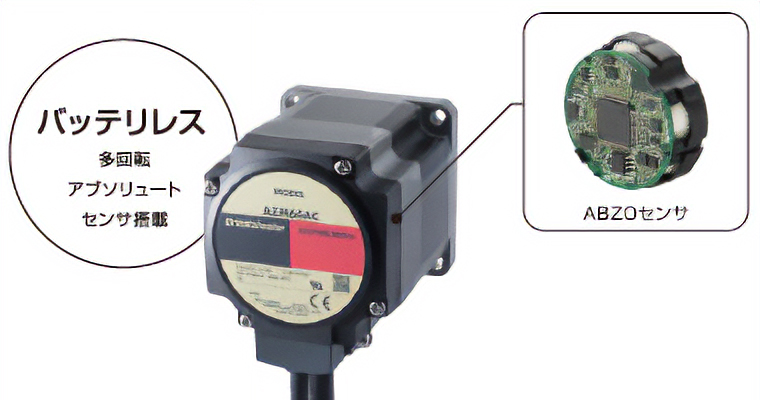
- 机械式编码器
即使断电也可保持位置信息 - 多圈绝对式编码器
可根据作为基准的原点,利用电动机轴检测±900转(1800次旋转)的绝对位置。
无需外部传感器
采用绝对式系统,无需原点传感器、限位传感器。
优点
- 高速原点返回+原点返回精度提升
- 降低成本
- 节省配线
- 不受外部传感器错误动作的影响
免电池
免电池的机械式编码器。
位置信息由ABZO编码器机械管理。
优点
- 不需要更换电池
- 提高驱动器设置的自由度
- 海外运送也令人安心
通过编程功能简化主程序
AZ系列支持连结运行、运转时间设定、条件区分及 Loop运行等多种编程功能(部分机种除外)。
可以使用支援软件 MEXE02 进行设定,可以简化上位系统的程序。
- 定位运行数据设定值(最多256点)
- 通用输入输出点数(输入10点、输出6点)
- 通信用输入输出点数(输入16点、输出16点)
搭载AZ系列的阵容
由于搭载的电动机相同,因此驱动方式和维护方式是通用的。
电动传动装置(搭载AZ系列)
| 电动滑台 | 电动缸 | 小型电动缸 | 齿条・齿轮系统 | 电动夹爪 | 中空旋转传动装置 |
|---|---|---|---|---|---|
| EAS系列 EZS系列 EZSH系列 |
EAC系列 | DR系列 DRS2系列 |
L系列 LJ直线减速机 与AZ系列组合使用※ |
EH系列 | DGⅡ系列 |
- 搭载电动机的电源输入因系列而异。详细阵容请参阅各个系列的页面。
- ※ LJ直线减速机需要另行购买AZ系列并进行组装使用。
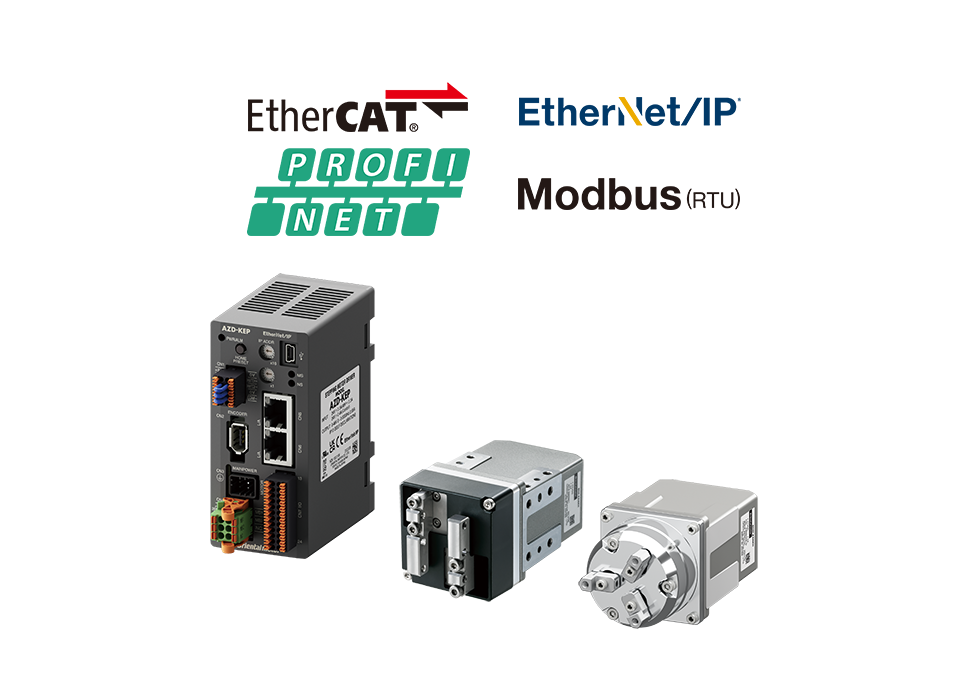
驱动器的特征与种类
可根据上位系统选择的驱动器
我们准备了可以对应各种控制、系统、界面的阵容。
| 驱动器类型 | 对应界面 | 单轴驱动器 | |
|---|---|---|---|
| DC电源输入 | |||

|
|||
| 网络对应 | 通过FA网络,直接从上位系统控制驱动器 | EtherCAT | ○ |
| EtherNet/IP™ | ○ | ||
| PROFINET | ○ | ||
| MECHATROLINK-Ⅲ | - | ||
| SSCNETⅢ/H | - | ||
| 内藏定位功能 |
将运行数据写入驱动器 可用 Modbus(RTU)及 I/O 控制 和网络转换器一起使用时,可通过 CC-Link 控制。 |
Modbus(RTU) I/O CC-Link※ |
○ |
| RS-485通信附脉冲序列输入 | 以脉冲信号控制 电动机状态信息可通过 Modbus(RTU)进行监视。 |
脉冲序列 Modbus(RTU) |
○ |
| 脉冲序列输入 | 通过脉冲信号控制 | 脉冲序列 | ○ |
通过支援软件MEXE02实现电脑简易驱动
使用支援软件MEXE02可进行运行数据及各类参数的设置编辑,还能实现示教功能和状态监视。
多功能支持,从启动调试到维护保养全面覆盖
-
启动调试
提供布线检查和测试运行时的实用功能。
- 运行数据设置与保存
- I/O监视
- 示教/遥控运行
-
调整
提供设备安装后电动机动作调整的实用功能。
- 波形监视
-
诊断·维护
提供运行中出现故障时的诊断和维护功能。
- Alarm监视
- 单元信息监视
- 状态监视
-

运行数据/参数设置界面 -
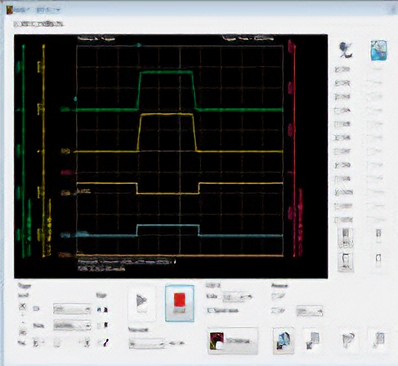
波形监视
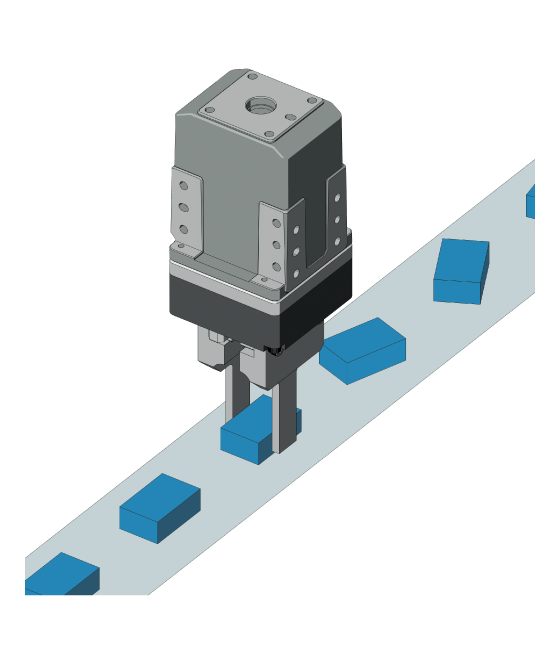
用途例
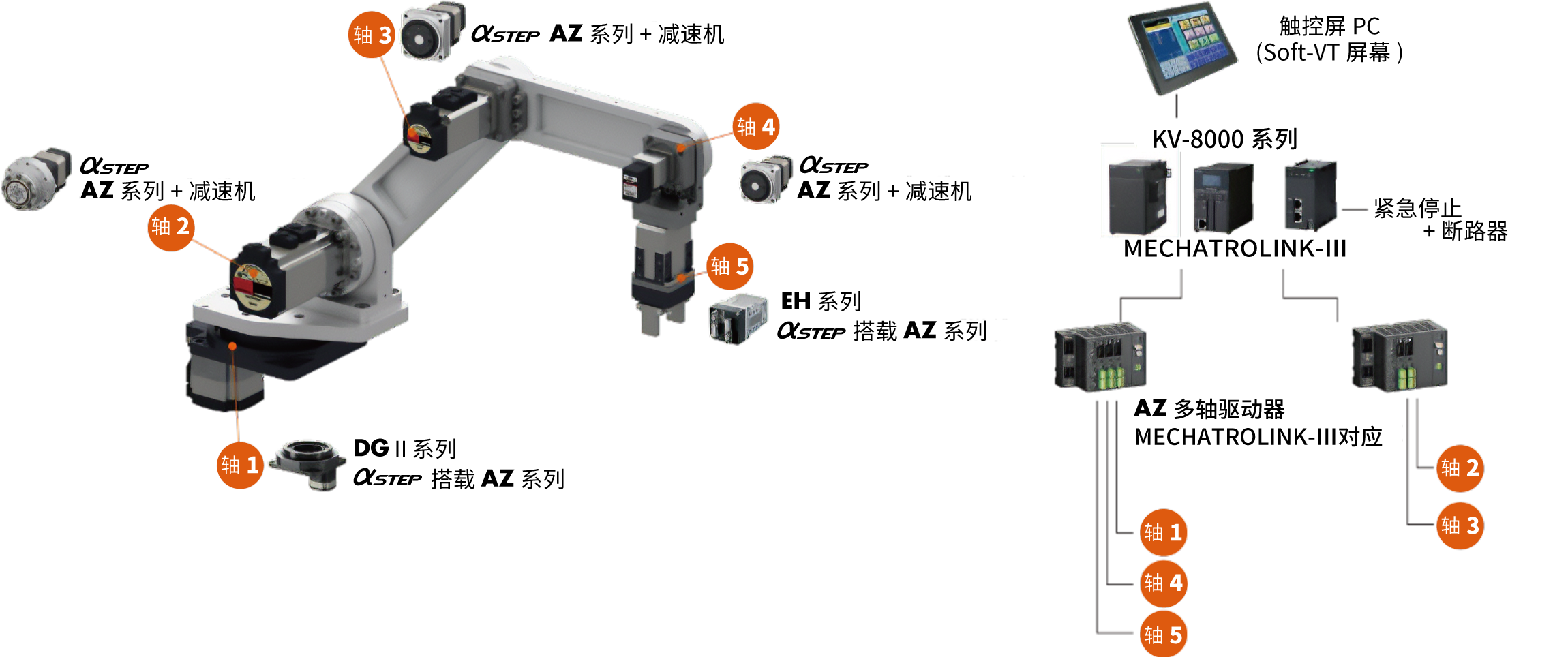
使用小型、轻量的EH作为末端执行器,可以减轻其他驱动轴的负担。由此,有助于缩短生产周期时间和实现小型化。
用于机器人的末端执行器
关节机器人的情况

直交轴机器人的情况

| EH3-AZAKH | EH4-AZAKH | EH4T-AZAK |
|---|---|---|
 |
 |
 |
| W42.5mm×D80.5mm×H36mm | W48.5mm×D91mm×H46mm | W47mm×D90.5mm×H46mm |
| 重量:200g | 重量:380g | 重量:280g |
机器人内部制作案例
可轻松安装到市售的工业机器人上

相关产品
AZ系列 mini驱动器 DC电源输入
与盒型驱动器相比,体积更小、重量更轻的 mini 驱动器。 也支持直流电源,相较于以往有更广泛的用途。

- ※ EtherCAT®是Beckhoff Automation GmbH(德国)授权的专利技术,并且是注册商标。
- ※ EtherNet/IP™是ODVA的商标。
- ※ PROFINET是PROFIBUS Nutzerorganisation e.V.(PNO)的商标或注册商标。
- ※ Modbus是Schneider Automation Inc.的注册商标。
- ※ Ethernet是富士胶片商业创新株式会社的注册商标。
型号筛选·购买