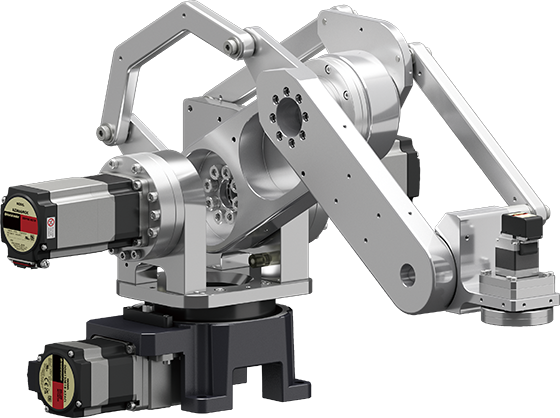
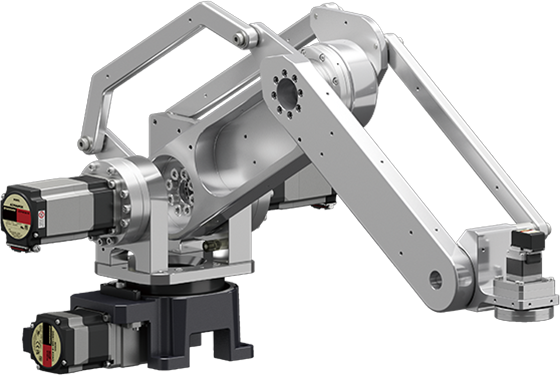
小型多关节机械臂 OVR
4轴垂直多节机械臂
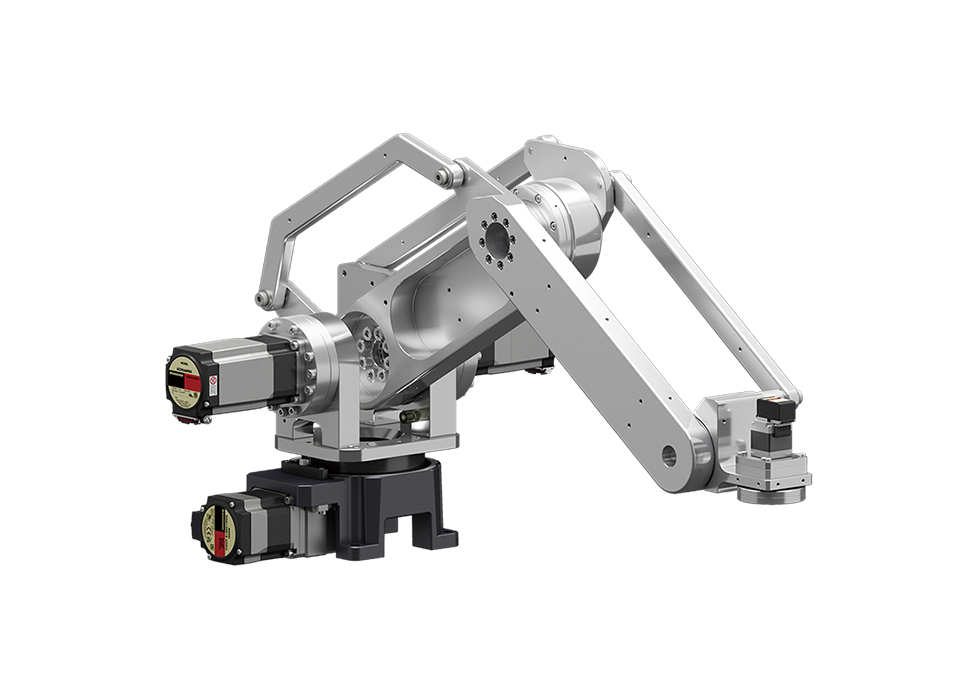
- 平行连杆机构
- 始终保持水平状态,以实现组件的稳定运输
- 最大搬运重量5kg
- 最大工作范围(水平)480/680/880mm
- 驱动电动机:搭载免电池绝对式编码器 AZ系列(DC输入)
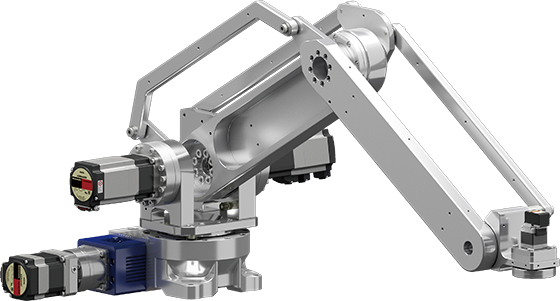
特征 | 4轴垂直多节机械臂
通过平行连杆机构实现轻量且稳定的水平运输
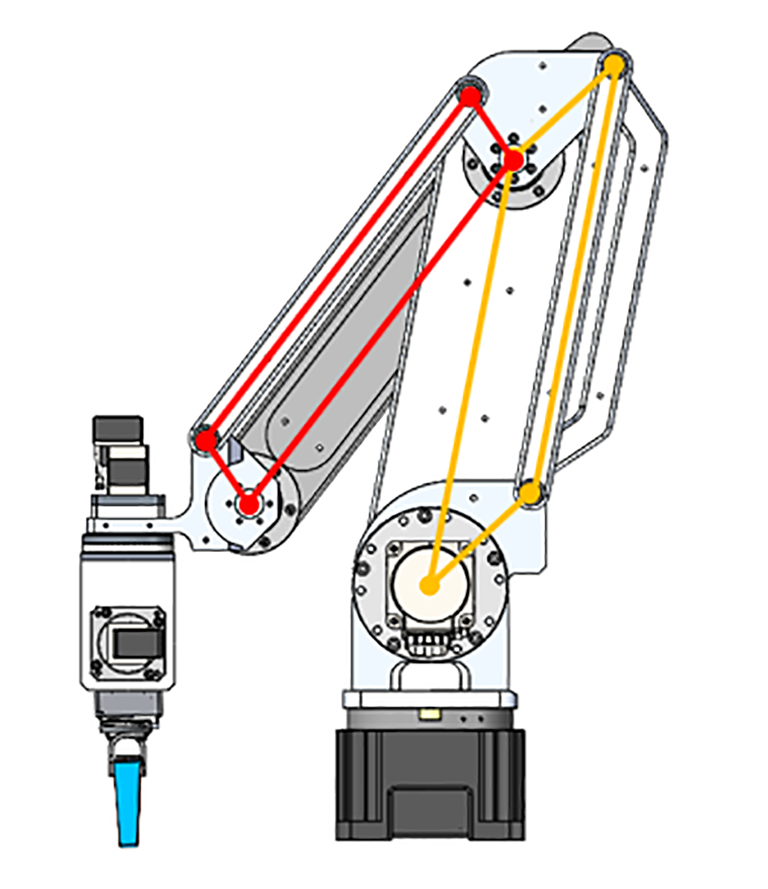
平行连杆机构具有以下优点。
- 最大可搬运重量5kg:通过将驱动 2 个手臂的电机放置在下方来实现,从而减轻关节的重量。
- 水平搬运:机械手臂的尖端在结构上始终与安装表面保持水平,从而实现稳定的水平运输。
可自行维护

部分电动机可以由客户自行更换。减少安装后的维护工作量(成本和时间)。
- ※ 我们将在维护和维修期间更换电动机。请咨询最近的分公司・营业所。
可定制化

购买时,可以根据客户的用途定制手臂的长度。(伸展变化 580mm、780mm)
简单控制的机器人控制器


还提供将MRC01和驱动器一体化的机器人控制器单元。
降低机器人导入时控制的门槛,有助于缩短起动时间。
- 注:使用机器人时,请考虑其作为工业机器人的安全性。(不能作为协作机器人使用)
使用搭载免电池绝对式编码器 AZ系列
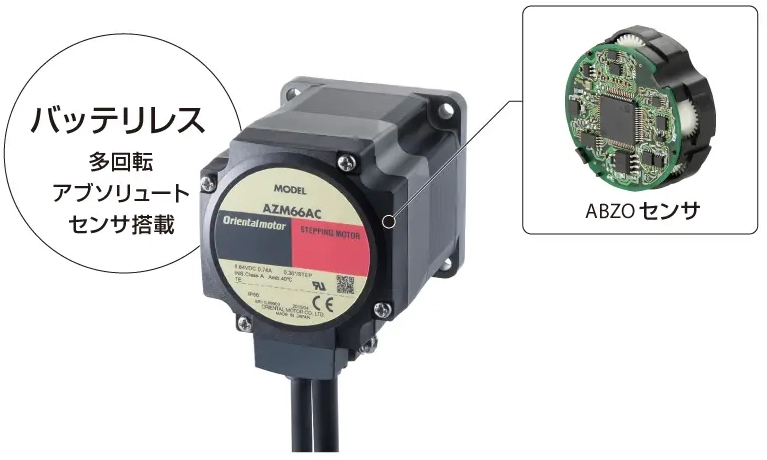
所有轴均采用αSTEP AZ系列(DC输入)。
由于采用绝对方式,因此无需外部传感器,可节省布线,免电池管理,可减少维护。
由于是DC输入,因此电源线的布线很容易。可以灵活应对线路安装和布局变更。
导入机器人前的实用工具
MRC Studio Simulator

在考虑导入机器人的阶段,即使没有机器人本体或MRC01,也可以在PC上进行实际动作模拟的软件(免费)。
MRC Reality

可以在实际空间中放置虚拟机器人,进行模拟操作。
我们提供了适用于智能手机/平板电脑以及头戴式显示器(Meta Quest 3)的应用程序。
规格
| 品名 |
OVR4048K5-V |
OVR4068K5-V |
OVR4088K5-V |
|
|---|---|---|---|---|
| 轴数 | 4轴 | |||
| 输入电压 | DC24V | |||
| 最大工作范围 | 垂直 | 570mm | 750mm | 900mm |
| 水平 | 480mm | 680mm | 880mm | |
| 可搬运重量 | 5kg | |||
| 标准周期时间*1 | 0.7sec | |||
| 可动范围*2 | S轴(旋转) | ±170deg | ||
| L轴(下臂) | -27~+80deg | |||
| U轴(上臂) | -58~+35deg | |||
| R轴(手腕旋转) | ±180deg*3 | |||
| 反复定位精度*4 | ±0.05mm | |||
| 容许转动惯量(手腕旋转轴) | 0.069kgm2 | |||
| 本体重量 | 16.5kg | 17.4kg | 26.9kg | |
| 设置形式 | 支架安装 | |||
| 定价 | 1,100,000日元 | 1,200,000日元 | 1,400,000日元 | |
- *1:负载1kg时,在高度25mm、宽度300mm的两点间往返所需的时间。使用机器人控制器MRC01时的周期时间。
- *2:这是相对于安装原点位置(0deg),在±方向上移动范围。
- *3:±170deg,使用机器人控制器MRC01时。
- *4:根据各轴减速机的规格值。
- *建议电源容量为DC24V 500W
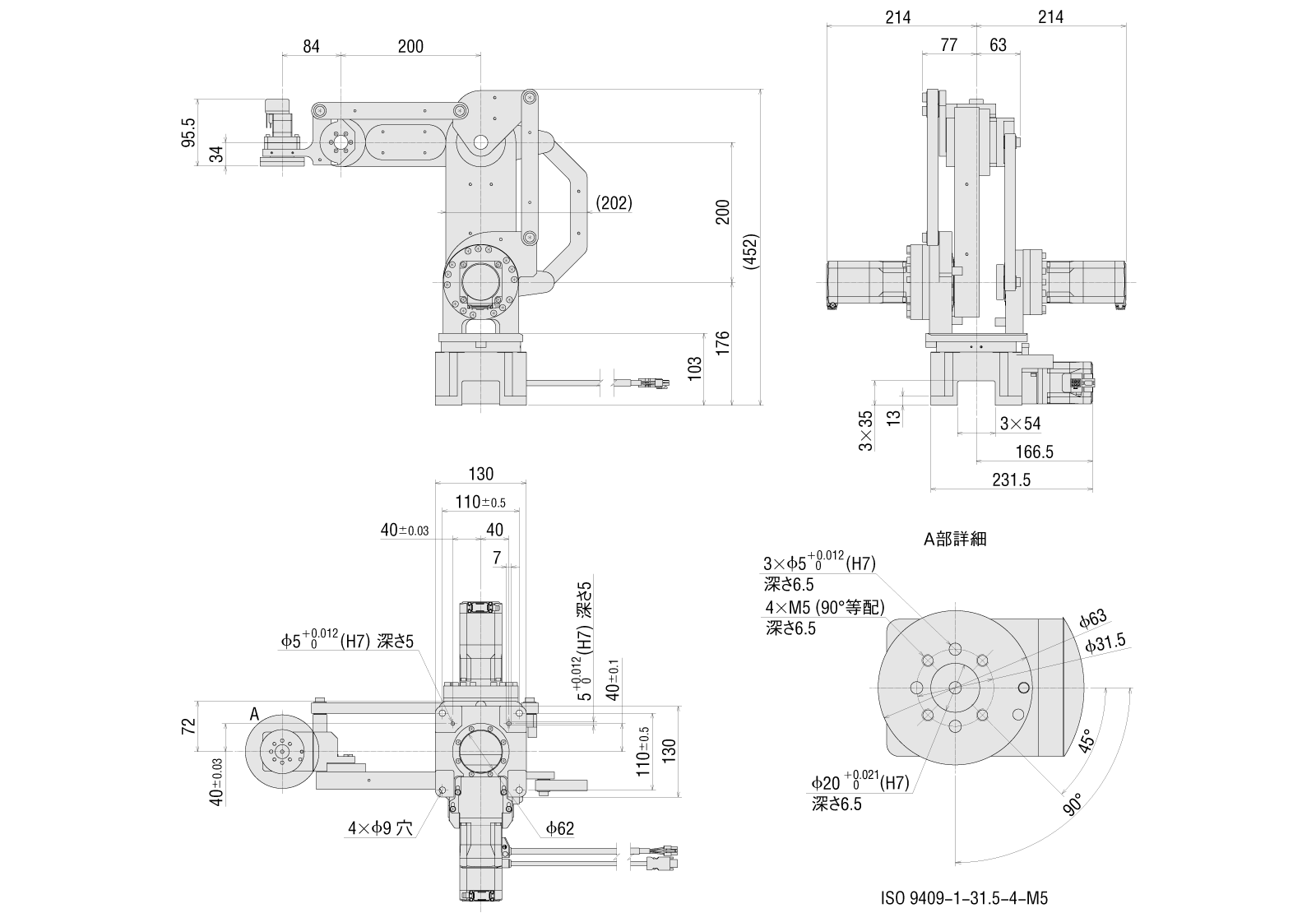
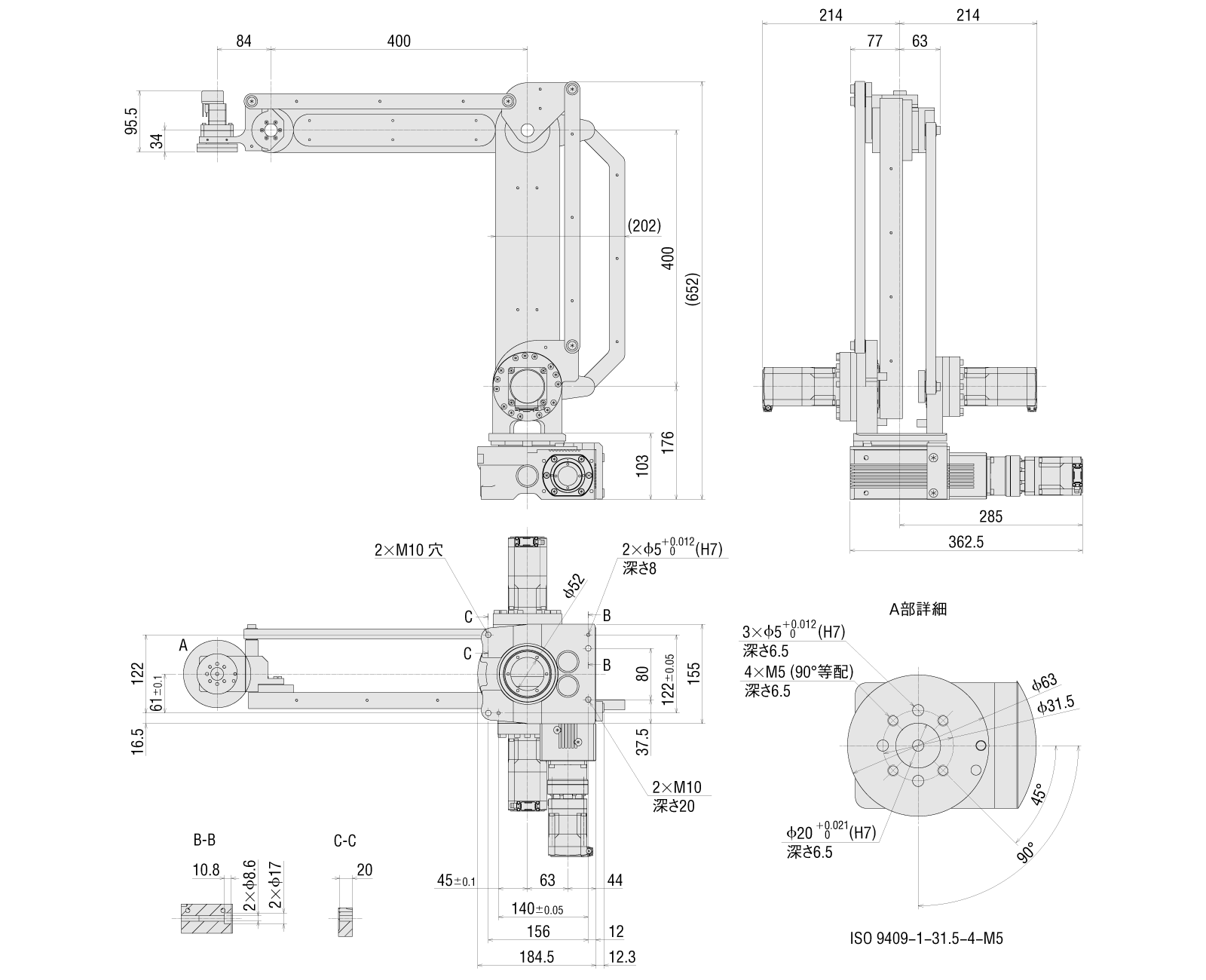
外形图・动作范围图
外形图(单位 mm)
OVR4048K5-V
OVR4068K5-V
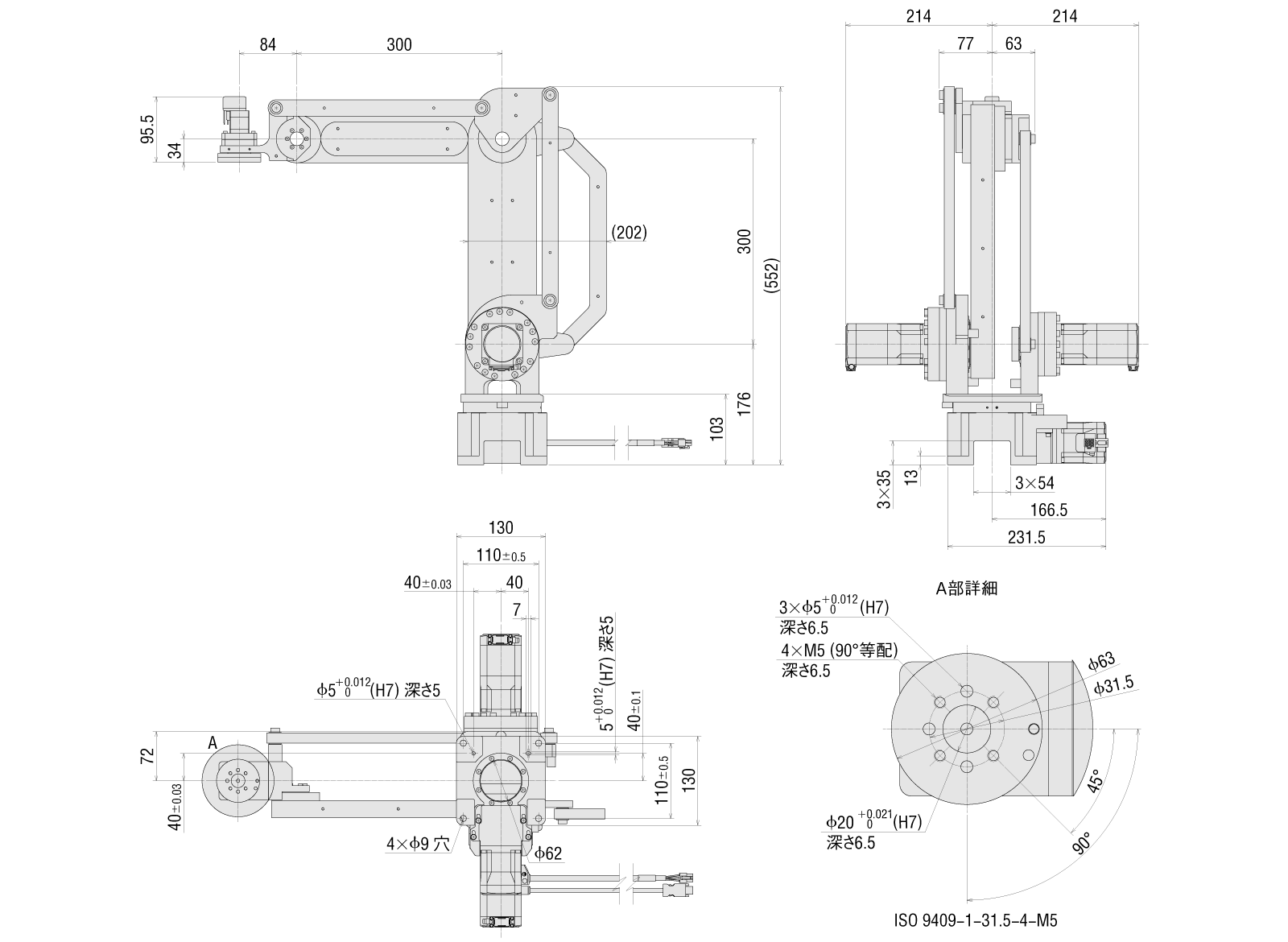
OVR4088K5-V
动作范围图(单位 mm)
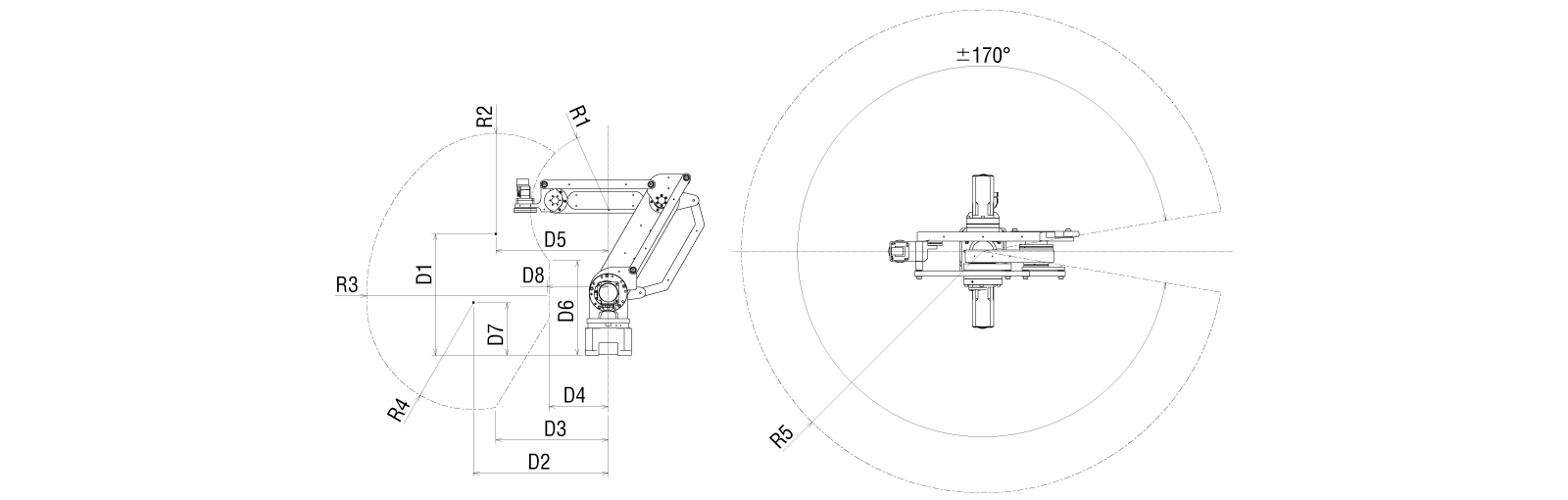
| 品名 | R1 | R2 | R3 | R4 | R5 | D1 | D2 | D3 | D4 | D5 | D6 | D7 | D8 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| OVR4048K5-V | 203 | 229 | 382 | 232 | 480 | 234 | 255 | 190 | 149 | 225 | 199 | 109 | 102 |
| OVR4068K5-V | 221 | 281 | 508 | 300 | 680 | 342 | 380 | 317 | 166 | 317 | 266 | 148 | 172 |
| OVR4088K5-V | 278 | 386 | 483 | 386 | 880 | 280 | 498 | 496 | 156 | 473 | 194 | 151 | 403 |
各种数据
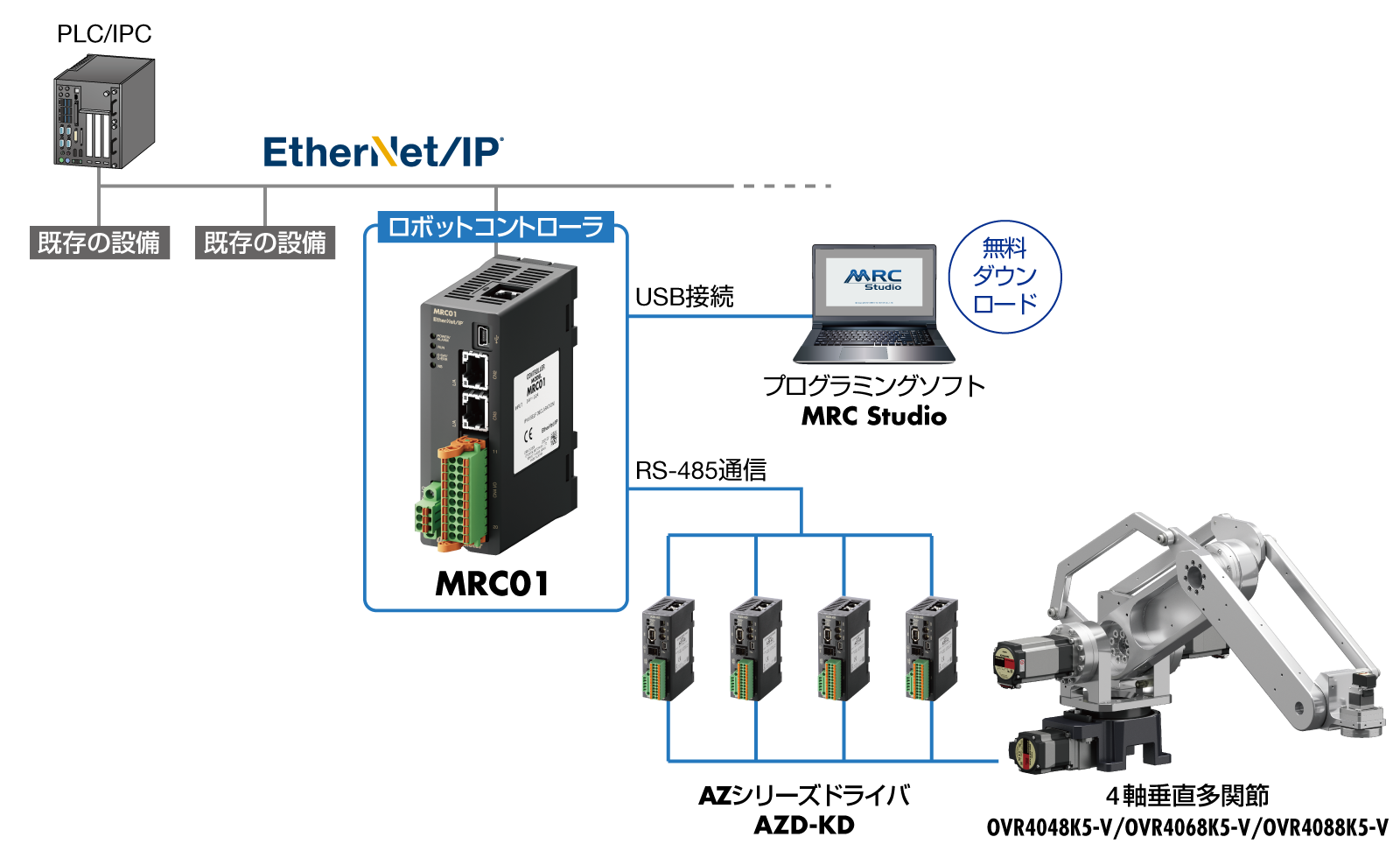
系统构成
除了机器人和电动机,机器人控制器、驱动器和电缆需另行购买。
使用机器人控制器MRC01和编程软件MRC Studio,可以轻松控制机器人。
推荐可连接至MRC01的驱动器为DC电源输入类型驱动器AZD-KD,或mini驱动器AZD-KR2D。
相关产品
教育用机器人 Motion System Master
通过机械和软件方面学习工业机器人要素的教材机器人套装,适用于工业高中、高等教育机构以及制造业从业者。
套装价格为498,000日元(定价),在抑制机器人教育引入成本的同时,由于无需特别教育,因此非常适合刚开始接触机器人教育和学习的用户轻松使用。

- 价格实惠,可开始机器人教育和学习的3轴小型桌面机器人
- 可以进行结构学习,利用命令图标进行编程也非常简单
- 安装面积φ16cm、本体重量4.2Kg
- 最大水平 Reach 长度390mm※、承载重量1kg、反复定位精度±0.1mm
- ※ 臂长可以根据需要进行定制
手腕翻转轴配件
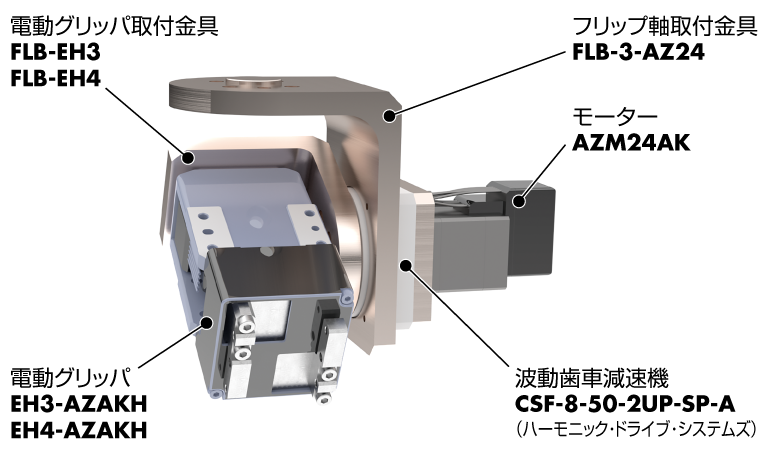
由于连杆机构的作用,机械臂末端始终朝下,因此可以进行仅使用4轴控制的抓取和放置操作。
但是,有很多情况下,如果没有手腕上下(翻转)的动作,使用起来会很不方便。
“手腕翻转轴配件”是解决这一问题的工具。
- 将电动夹爪提升90度,从货架上抓取工件,放入包装箱中。
- 抓取工件后,拍摄背面图像,然后进行装箱。
- 稍微倾斜镊子、焊枪进行作业。
等等,用途将进一步扩大。 - ※总重量:1.0kg以下(含电动夹爪)
- ※驱动源:AZ系列(DC24V)+谐波驱动®