电动滑台/电动缸的选用 计算电动缸(仅限带轴导轨)负载惯性力矩
选择方法
负载惯性力矩
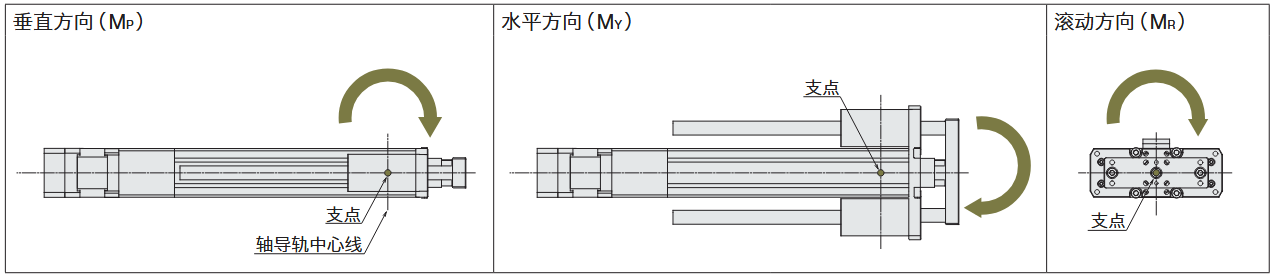
在用电动缸(仅限带轴导轨)搬运工作物时,若工作物的重心位置偏离轴导轨中心(支点),负载惯性力矩会对轴导轨发生作用。
根据偏置位置,
作用方向分别向垂直方向(MP)、水平(MY)和滚转(MR)作用。
选用的电动缸即使满足搬运质量、定位时间的条件,但如果工作物的重心位置超出轴导轨中心(支点),就会因为负载惯性力矩而缩短其运行寿命。因此有必要计算负载惯性力矩,并确认其是否在规格值范围内。请确认静止状态时作用的惯性力矩为静态容许惯性力矩,工作中作用的惯性力矩为动态容许惯性力矩。
负载惯性力矩作用的考虑点
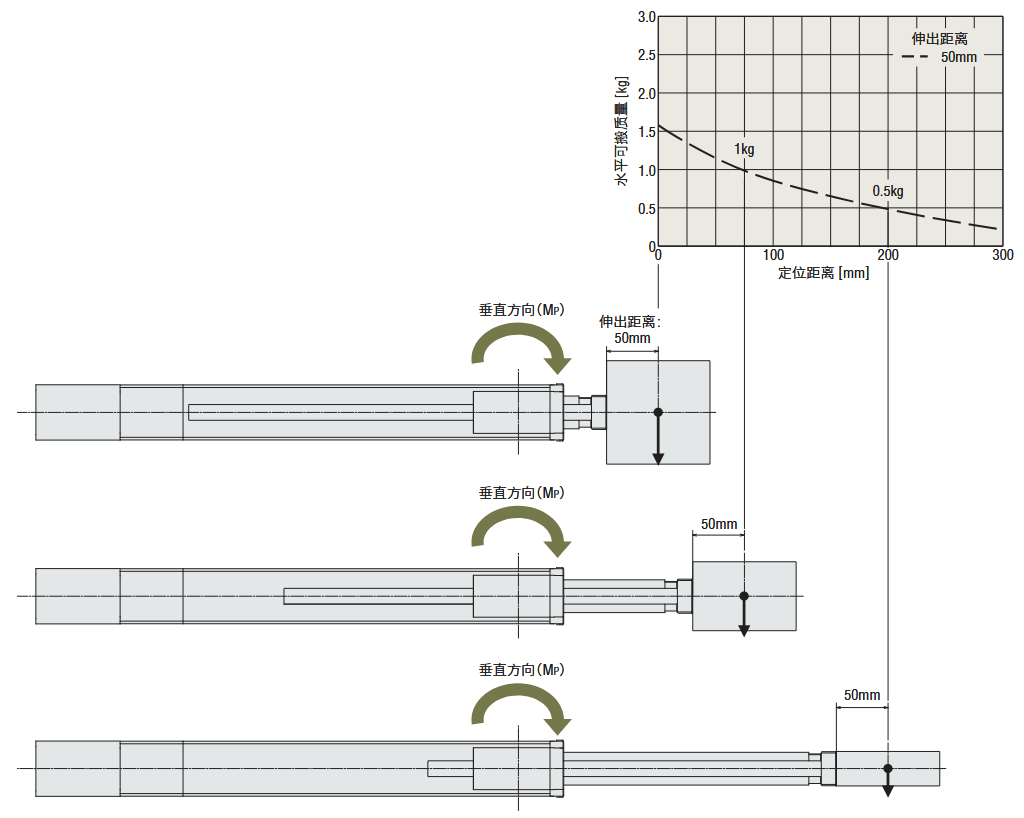
水平、壁挂方向使用时
电动缸(仅限带轴导轨)停止及工作中负载惯性力矩作用时,请确认刊载电动缸部规格表页的特性图。
该特性图在静态惯性力矩及动态惯性力矩中通用。

垂直方向的容许惯性力矩(MP)
各产品的规格表中备有考虑负载惯性力矩计算的计算结果特性图,水平方向安装、壁挂方向安装时,请予以确认。
滚动方向的容许惯性力矩(MR)

垂直方向使用时
从工作物、负载的施力点求出作用在电动缸(仅限带轴导轨)的负载惯性力矩,确认静态容许惯性力矩和动态容许惯性力矩的强度足够。
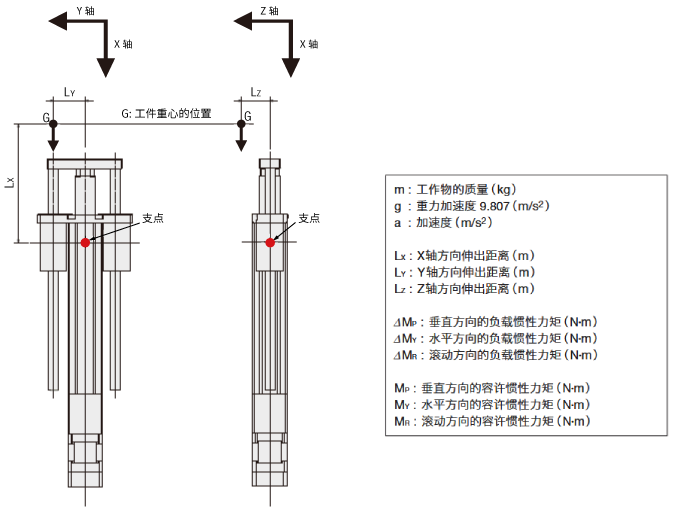
- 负载惯性力矩判断公式:
伸出范围的工作物为复数时需用各工作物惯性力矩的和来判定。
- 工作物为复数(n个)时
静态惯性力矩作用的考虑点
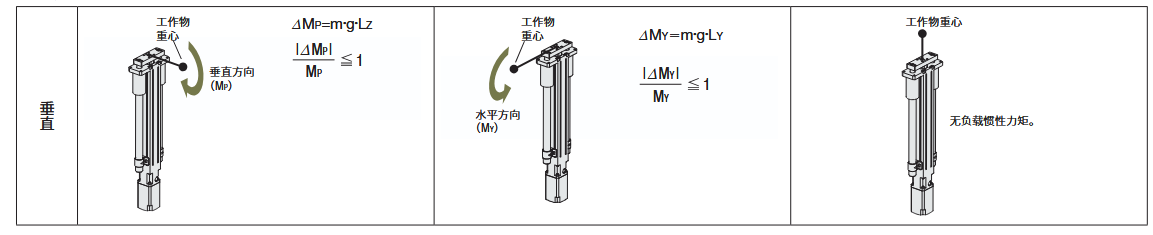
以下图解表示将电动缸(仅限带轴导轨)安装在垂直方向,在停止状态下作用的负载惯性力矩(ΔMP、ΔMY、ΔMR)。请使用负载惯性力矩判断 公式,确认负载惯性力矩在静态容许惯性力矩(MP、MY、MR)的范围内。
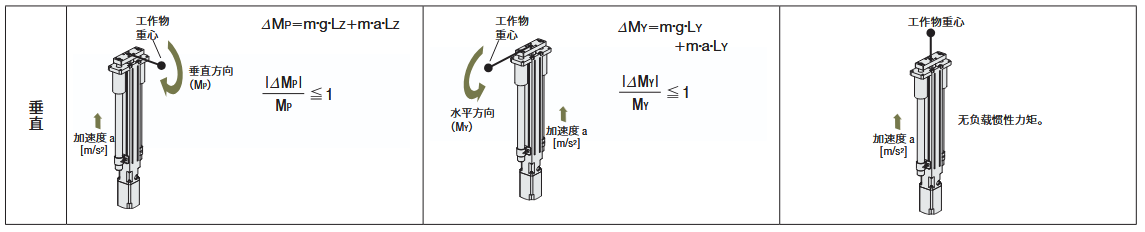
动态惯性力矩作用的考虑点
以下图解表示将电动缸(仅限带轴导轨)安装在垂直方向,在工作中(考虑加速度)作用的负载惯性力矩(ΔMP、ΔMY、ΔMR)。使用负载惯性力 矩判断公式确认负载惯性力矩在动态容许惯性力矩(MP、MY、MR)的范围内。
电动缸(仅限带轴导轨)的轴导轨部位预测使用寿命已设计成各系列的使用寿命基准值。
但是,负载惯性力矩判断公式大于1时,在其使用状态下预测使用寿命将缩减。
可按下述计算式确认其与预测使用寿命的差距。
- ※预测使用寿命因产品而异,详细请点此确认
电动机选型依赖
技术人员将为协助您计算转矩等选型操作,选择适合的电动机产品。(免费)
亦会根据机构提案最适合的产品,介绍选购配件或提供计算过程。
最快将于24小时内答复。(在服务时间内)
服务时间:周一至周五9:00~17:00(国定假日除外)