概要・相关信息
概要
步进电动机能轻松实现精确定位运行
作为一种可以通过脉冲信号精确控制旋转角度和转速的电动机,它被广泛应用于各种设备中。
精细、精确的定位运行
步进电动机是如同时钟的秒针一般,每次旋转一定角度的电动机。这个角度被称为基本步距角。我们提供基本步距角为0.72°的5相步进电动机和基本步距角为1.8°的2相步进电动机。

通过脉冲信号轻松控制
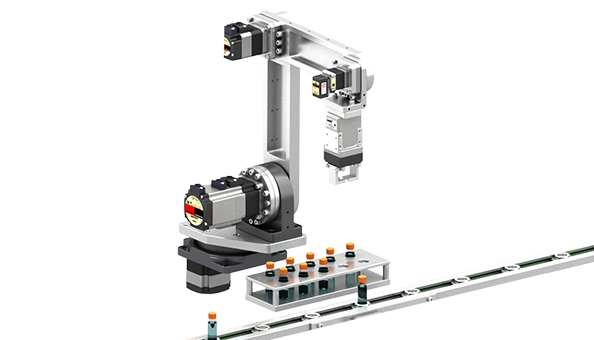
进行高精度定位运行的系统配置如下所示。步进电动机的旋转角度和转速可以通过控制器发出的脉冲信号精确控制。
系统配置

脉冲信号是什么
反复操作电压的ON/OFF而产生的电信号。
ON/OFF开关1周期计为1脉冲,电动机输入1个脉冲,电动机输出轴就旋转1个步距角。

旋转角度与脉冲数成正比
步进电动机的旋转角度与输入驱动器的脉冲信号数(脉冲数)成正比。
步进电动机的旋转角度与脉冲数的关系如下。
θ = θS × A
-
θ
-
电动机输出轴的旋转角度 [°]
-
θS
-
步距角(分辨率)[°/step]※
-
A
-
脉冲数

转速与脉冲速度成正比
步进电动机的转速与输入驱动器的脉冲信号速度(脉冲频率)成正比。
脉冲速度[Hz]与转速[r/min]的关系如下。
N = θS/ 360 × f × 60
-
N
-
电动机输出轴的转速 [r/min]
-
θS
-
步距角(分辨率)[°/step]※
-
f
-
脉冲速度 [Hz]
(1秒内输入的脉冲数)
- ※ 对于减速机型电动机,是指减速机输出轴上的步距角(分辨率)

小型、高转矩
步进电动机可实现小机型高转矩。
因此,其卓越的加速性和响应性在需要频繁起动/停止的用途中能发挥巨大威力。
此外,通过使用减速电动机,可以得到更大的转矩。
可以实现频繁的启动和停止

转速-转矩特性(电动机安装尺寸60mm的情况)

可以保持停止位置
步进电动机在停止时也具有保持力,因此即使在没有机械制动的情况下,也能保持停止位置。

可以驱动大惯性负载
与同等安装尺寸的伺服电动机相比,步进电动机可以驱动更大的惯性负载。
以30倍转子转动惯量作比较
-
步进电动机
转动惯量22.4×10-4kg・m2
(转子转动惯量的30倍)-
惯性负载
-
直径169mm、厚度10mm、材质铝
-
电动机
-
安装尺寸60mm
长度90mm
-
-
原有产品伺服电动机
转动惯量4.0×10-4kg・m2
(转子转动惯量的30倍)-
惯性负载
-
直径110mm、厚度10mm、材质铝
-
电动机
-
安装尺寸60mm
长度96.5mm
-
用途例
X-Y轴的工作台驱动

定量注入机的送料

堆料机的上下驱动

定量涂布

电动机的种类
步进电动机的种类以标准类型为基础,备有带电磁制动型和各种减速机型。您可以根据用途所需的功能和性能进行选择。以下介绍一些代表性示例。
标准型
使用简单的基本型。
备有各种尺寸的电动机。

高转矩型
通过在转子与定子的小齿间插入永久磁铁,实现了高转矩和高响应。与同等尺寸的标准类型相比,实现了大幅度的转矩提升。

高分辨率型
将电动机的基本分辨率提高到标准型的2倍的产品。
可以获得更高的定位精度和减振效果。

带编码器型
可以监视当前位置和检测位置偏移等。
例如,通过比较当前位置和指令位置,可以确认电动机的正常动作。

带电磁制动型
内置无励磁动作型电磁制动器的产品。
在发生停电等意外情况时,可以保持负载,防止下降。
- 电动机在断电后失去自保持力,在上下驱动或外力作用下无法保持停止位置。请使用带电磁制动型的步进电动机用于升降装置等用途。

减速机型
这些电动机采用了减少齿隙的专用位置控制减速机,以充分利用电动机的高可控性。
即使在承受大负载转矩的用途中,减速机也能进行高精度、平滑的运行。

减速机型电动机的优点
作为步进电动机的一种类型,我们提供了安装有减速机的减速机型电动机。使用减速机型电动机不仅可以实现减速、高转矩和高分辨率,还具有以下优点。
可以驱动大惯性负载
使用减速机型电动机时,与标准电动机相比,可旋转的惯性负载转矩随着減速比的平方成正比增加。因此,可以驱动大惯性负载。
|
|
|
| 电动机类型 | 减速机型 (Gear ratio5) | 标准类型 |
| 品名 | AZM66AC-PS5 | AZM66AC |
|
惯性负载转矩 (转子惯性转矩的30倍) |
277.5×10-4kg・m2 | 11.1×10-4kg・m2 |
|
惯性负载直径 (厚度20mm,材料铝合金) |
317mm | 142mm |
| 速度范围 | 0~600r/min | 0~6000r/min |
可以改善启动和停止时的阻尼特性
在惯性负载较大或加减速时间较短的情况下,与标准电动机相比,减速机型电动机更能抑制阻尼,实现稳定驱动。特别适合于需要在短时间内对大惯性进行定位的用途,如分度台或机械臂驱动。
可以实现小型化
在比较励磁最大静止转矩相等的标准电动机和减速机型电动机时,减速机型电动机的安装尺寸更小,因此可以减轻质量和体积。在要求设备小型化、轻量化的情况下非常有效。

刚性高,抗扭曲性强
减速机型电动机刚性高,抗扭曲性强,与标准电动机相比,受负载转矩变化的影响较小。因此,即使负载大小发生变化,也能实现稳定的高精度定位。
-
应用示例:升降机
在升降机这样的上下驱动机构中,即使工件数量或重量发生变化,也能高精度地停止。
-
应用示例:监视摄像头
即使在强风使摄像头摇晃的情况下,也能保持稳定的位置。
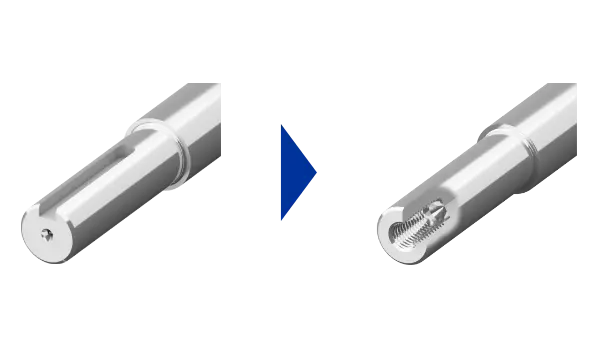
可以直接在负载面上安装(谐波减速机型、HPG减速机型)
谐波减速机型(除安装尺寸90mm外)和HPG减速机型可以直接在与轴一体化的旋转面上安装负载。
外观和安装示例

应用示例:分度盘
不仅有助于削减零件、节省工时,还提高了可靠性。此外也适用于加载惯性力矩负荷的运行场合。

减速机型电动机的种类和特征
步进电动机有各种类减速机型电动机可以用。
您可以根据转矩、精度(齿隙)等选择最合适的类型。
请点击右图以确认各类型的特征和主要规格。
- 请参考以了解各类型的差异。
- 相应的减速机型电动机根据系列而不同。

| 减速机种类 | 平行轴 | 直交轴 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
|
SH (直齿轮 机构) |
CS (直齿轮 机构) |
TH (直齿轮 机构) |
TS (直齿轮 机构) |
PS (行星齿轮 机构) |
PN (行星齿轮 机构) |
HPG (谐波行星® |
谐波 (谐波 驱动® |
FC (面齿轮机构) |
|||
| 外观 |

|

|

|

|

|

|

|

|

|

|
|
| 特征 | |||||||||||
| 精度 | 适用于2相 | 小齿隙 | 无齿隙 | 小齿隙 | |||||||
| ★ | ★ | ★★ | ★★ | ★★ | ★★★ | ★★★ | ★★★ | ★★ | |||
| 高转矩 | ★ | ★★ | ★ | ★★ | ★★ | ★★ | ★★ | ★★ | ★★ | ||
| 可使用瞬时最大转矩 | - | - | - | ○ | ○ | ○ | ○ | ○ | - | ||
| 负载面安装 | - | - | - | - | - | - | - | ○ | ○ | - | |
| 中心轴 | - | ○ | - | - | ○ | ○ | ○ | - | ○ | ○ | |
| 主要规格 | |||||||||||
| 减速比的种类 | 3.6、7.2、9、10、18、36 | 5、10、15、20 | 3.6、7.2、10、20、30 | 3.6、7.2、10、20、30 | 5、7.2、10、25、36、50 | 5、7.2、10、25、36、50 | 5、15 | 50、100 | 7.2、10、20、30 | ||
| 速度範囲[r/min] | ~833 | ~600 | ~500 | ~833 | ~600 | ~600 | ~900 | ~70 | ~416 | ||
| 容许转矩[N・m] | ~4 | ~4.5 | ~4 | ~6 | ~8 | ~8 | ~9 | ~10 | ~10.5 | ||
| 瞬时最大转矩[N・m] | - | - | - | ~10 | ~20 | ~20 | ~19 | ~36 | - | ||
| 齿隙[arcmin] | 45~70 | 45~70 | 10~35 | 10~35 | 7~9 | 2~3 | 3 | 0 | 10~15 | ||
| 齿轮的种类 | SH | CS | TH | TS | PS | PN | HPG | 谐波 | FC | ||
- ※ 上述值作为了解各类型差异的参考。根据安装角尺寸、减速比而变化。
- ※ 主要规格值为安装角尺寸60mm中找到最佳实践。
-
※ 谐波行星®、谐波传动®单击功能区上
 是谐波传动系统株式会社的注册商标或商标。
是谐波传动系统株式会社的注册商标或商标。
-
关于每种类型的原理和结构,请看技术资料。
步进电动机、伺服电动机用齿轮
驱动程序类型
内藏定位型
将运行数据设定为驱动器,从上级开始选择运行数据并执行的类型。与上级的连接、控制I/O、Modbus(RTU) / RS-485通信、FA可以在网络中进行。通过使用网络转换器(另售)CC-Link通讯和MECHATROLINK通信、EtherCAT可以通过通信控制。
-
- FLEX(弹性)是指I/O控制Modbus(RTU)控制、通过网络转换器FA是支持网络控制的产品的总称。


RS-485带通信的脉冲列输入类型(仅AZ系列)
是通过对驱动器输入脉冲来执行运行的类型。由客户准备的定位单元(脉冲振荡器)进行电动机的控制。RS-485通过使用通信,可监控电动机的状态信息(位置、速度、扭矩、警报、温度等)。



脉冲列输入类型
是通过对驱动器输入脉冲来执行运行的类型。由客户准备的定位单元(脉冲振荡器)进行电动机的控制。支援软件(MEXE02)可确认警报履历及监控各种状态。


网络对应驱动器(仅AZ系列)
EtherNet/IP、EtherCAT支持通信的驱动程序。可以从网络上直接控制。通过1根通信电缆连接上级控制机器和驱动器,实现省接线。

多轴驱动器(AZ系列,系列DC仅限电源输入)
SSCNETⅢ/H、MECHATROLINK-Ⅲ、EtherCAT对应的多轴驱动器。
AZ系列,系列DC可以连接电源输入的电动机和搭载它们的电动执行器。
准备了可以连接2轴、3轴、4轴的驱动器。

- ※ EtherCAT®表示Beckhoff Automation GmbH(德国)授权的专利技术,注册商标。
- ※ EtherNet/IP™表示ODVA的商标。
- ※ MECHATROLINK表示MECHATROLINK是协会的注册商标。
- ※ SSCNETⅢ/H是三菱电机株式会社的注册商标。
- ※ CC-Link表示CC-Link是协会的注册商标。
- ※ Modbus(RTU)单击功能区上Schneider Automation Inc. 的明细栏样式中定义的设置。
- ※ 支援软件MEXE02表示、从这里开始可以下载。
关联情报
给还不确定要哪种系列的您
相关信息