5相步进电动机
PKP/PK系列

- 高转矩·低振动
- 安装尺寸20~85mm
- 备有减速机型、带编码器型
PKP系列的带编码器型,现在配备高分辨率·高角度精度的编码器。
特征 | 5相步进电动机 PKP/PK系列
提升性能
高精度
由于5相PKP系列的步距角为0.72°(高分辨率型为0.36°)停止精度为± 0.05°,因此可实现高精度定位。另外,以微步驱动器控制时,静止角度误差依旧保持高精度,与全步驱动时几乎相同。
不会因微步降低停止精度
(5相CVD系列驱动器+5相PKP系列电动机)


低振动化
由于5相PKP系列的基本步距角较小,为0.72°(高分辨率型为0.36°),因此与基本步距角1.8°的2相步进电动机相比,振动和噪音较低。另外,通过微步驱动器控制时,可进一步降低振动与噪音。
2相步进电动机的振动特性示例

5相步进电动机的振动特性示例

小型、薄型连接器采用
PKP系列采用小型、薄型连接器,连接器部的突出降低(部分产品除外)。此外,出线方向朝上,电动机电缆线的出线方向自由度提高。
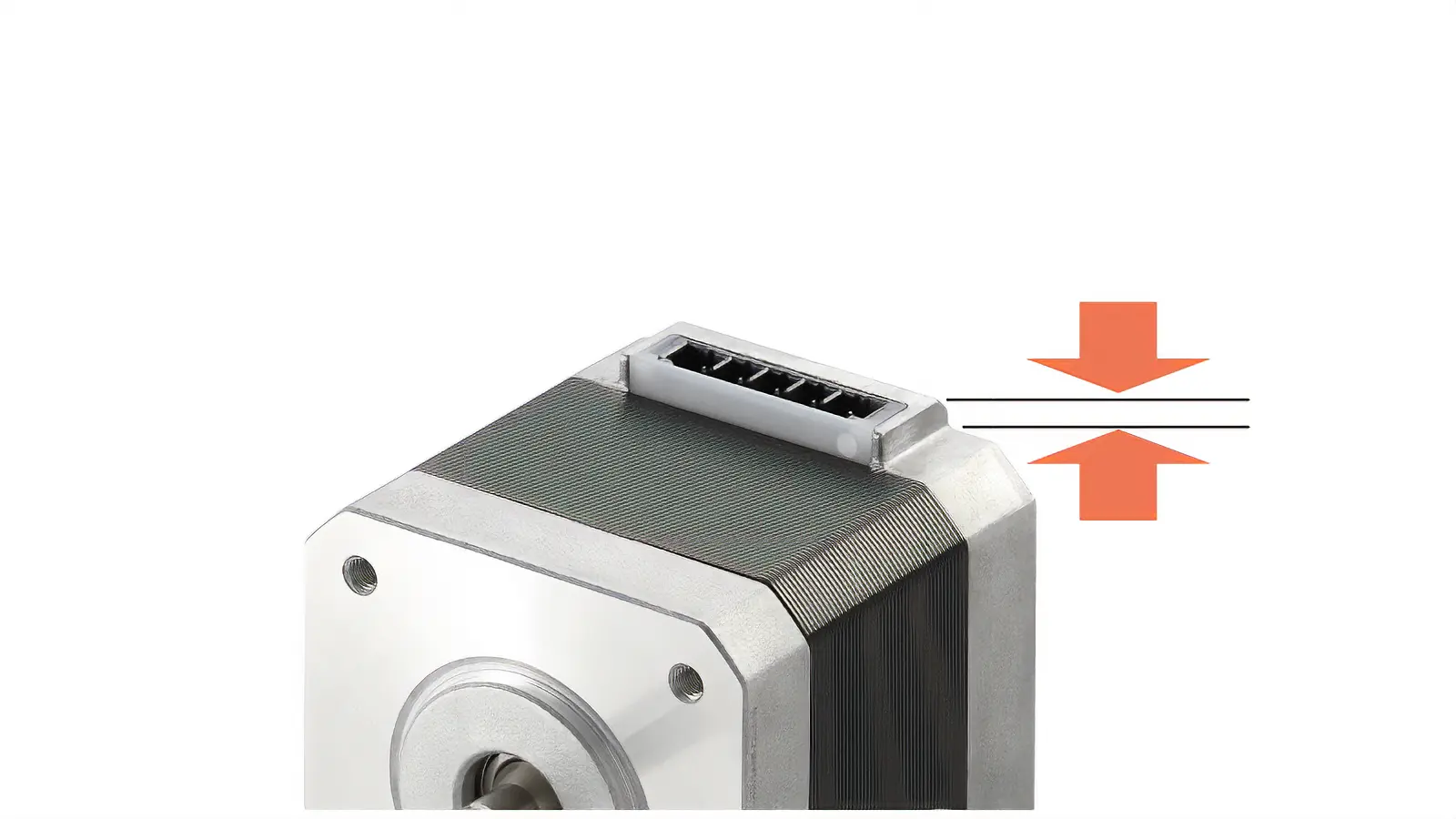
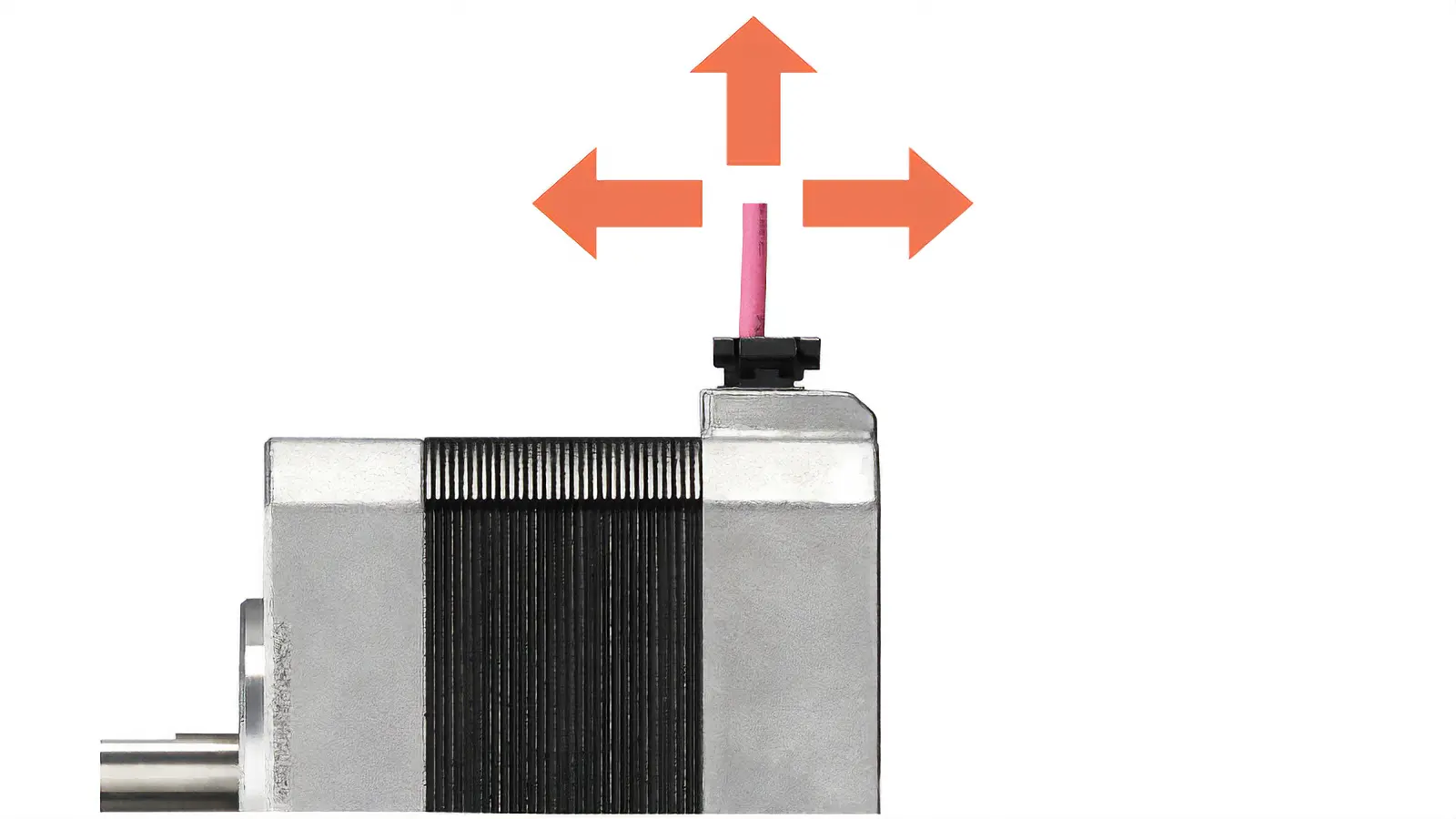
- ※ 详情请参阅各电动机外形图。
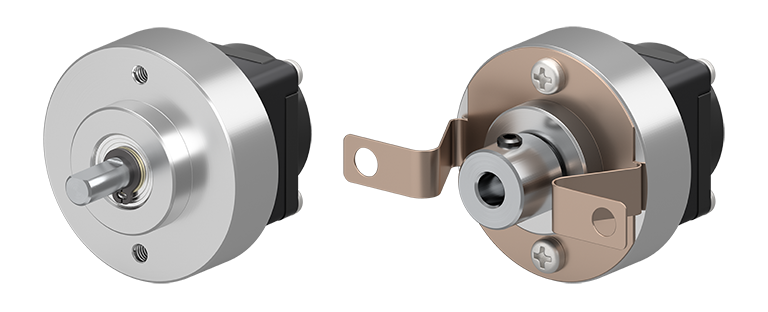
带编码器
备有带编码器型。通过比较当前位置和指令位置,确认电动机的正常运作。

编码器主要规格
| 种类 | 标准型 |
|---|---|
| 分辨率 | 500P/R、1000P/R ※ |
| 角度精度 | ±0.36°(电动机输出轴的换算值) |
| 输出信号 | A相、B相、Z相(3ch) |
- ※ 标准型的安装尺寸42mm、60mm,还备有分辨率1000P/R的产品种类。产品详情请点击 此处
关于角度精度
实际旋转角度与编码器输出角度的误差。

可检测电动机位置信息
可以监控当前位置及检测出位置偏移等。
例如,通过当前位置和指令位置的比较,可确认电动机的正常工作。
系统构成示例

- * 电动机输出轴的换算值
可进行再现性高的原点返回
在励磁原点(稳定点)输出Z相信号,因此可代替原点传感器(安装在电动机轴上检测1圈内原点的传感器)。
此外,Z相输出信号和TIM输出信号 ※ 的并用变得容易,提高了原点返回的再现性。
- ※ 电动机输出轴从原点每旋转7.2°(高分辨率型为3.6°)时,从驱动器输出的信号。
Z相输出的时序固定时
新编码器(磁性式)

以励磁原点(稳定点)为中心,以±3.6°的幅度输出Z相信号。
Z相输出的时序不固定时

由于Z相输出和励磁稳定点错开,因此难以替代原点传感器,也难以与TIM信号并用。
搭载小型编码器
安装尺寸56.4mm时
- ※ 外形图中橙色部分为编码器。

可选择电压输出型和差动输出型。
备有电压输出型和差动输出型。
另外,备有便于编码器配线的电缆线选购配件(另售)。
电动机种类
| 分类 | 类型 |
安装尺寸 [mm] |
基本步距角 [°] |
附加功能 |
|---|---|---|---|---|
| 无减速机 |
标准 
|
20 ~ 85 | 0.72 | 编码器 |

|
42、60 | 0.36 | 无 | |
| 带减速机 |

|
28、42、60 | 0.024 ~ 0.2 | 无 |

|
42、60 | 0.024 ~ 0.2 | 无 | |

|
22、28、42、60 | 0.0144 ~ 0.18 | 无 | |

|
28、42、60 | 0.0144 ~ 0.144 | 无 | |

|
20、30、42、60 | 0.0072 ~ 0.0144 | 无 |
产品阵容
| 类型 |
基本步距角 [°] |
安装尺寸 [mm] |
励磁最大静止转矩 [N・m] |
额定电流 [A/相] |
|---|---|---|---|---|

|
0.72 | |||
| 28 | 0.052 ~ 0.091 | 1.2 | ||
| 42 ※1 | 0.22 ~ 0.5 | 1.8 | ||
| 56.4 ※2 | 0.44 ~ 1.5 | 2.8 | ||
| 60 | 0.66 ~ 2.1 | 2.4 ~ 3.8 | ||
| 85 | 2.1 ~ 6.3 | 2.8 | ||

|
0.36 | 28 | 0.042 ~ 0.09 | 0.35 ~ 0.75 |
| 42 | 0.26 ~ 0.44 | 1.8 | ||
| 60 | 0.78 ~ 2.3 | 2.4 | ||

|
0.72 | 28 | 0.048 ~ 0.091 | 0.35 ~ 1.2 |
| 42 | 0.22 ~ 0.5 | 1.8 | ||
| 56.4 | 0.44 ~ 1.5 | 2.8 | ||
| 60 | 0.66 ~ 2.1 | 2.4 ~ 3.8 | ||

|
0.36 | 28 | 0.042 ~ 0.09 | 0.35 ~ 0.75 |
| 42 | 0.26 ~ 0.44 | 1.8 | ||
| 60 | 0.78 ~ 2.3 | 2.4 | ||
|
|
0.024 〜 0.2 | 28 | 0.2 〜 0.5 | 0.35 |
| 42 | 0.35 〜 1.5 | 0.75 | ||
| 60 | 1.25 〜 4 | 1.4 | ||
|
|
0.2 ~ 0.024 | 42 | 0.65 ~ 2.3 | 1.8 |
| 60 | 1.8 ~ 6 | 2.8 | ||

|
0.0144 ~ 0.18 | 22 | 0.074 〜 0.24 | 0.35 |
| 28 | 0.2 〜 0.4 | 0.35 | ||
| 42 | 1 〜 3 | 0.75 | ||
| 60 | 3.5 〜 8 | 1.4 | ||
|
|
0.0144 ~ 0.144 | 28 | 0.074 〜 0.24 | 0.35 |
| 42 | 0.8 〜 1.5 | 0.75 | ||
| 60 | 3.5 〜 8 | 1.4 | ||

|
0.0072 ~ 0.0144 | 20 | 0.4 〜 0.6 | 0.35 |
| 30 | 1.8 〜 2.4 | 0.75 | ||
| 42 | 3.5 〜 5 | 0.75 | ||
| 60 | 5.5 〜 8 | 1.4 |
-
※1
-
由于特性和连接器形状的差异,我们提供了mini连接器规格和连接器规格。
-
※2
-
备有输出轴直径φ6.35mm的产品。详情请咨询附近的 分公司 · 营业网点 。
相关产品
组合驱动器(另售)
备有5相步进电动机用驱动器。
-
带安装板 水平出线
连接器的方向为横向。

-
带安装板
连接器的方向为朝上。
-
无安装板
连接器的方向为朝上。

- ※ 图片为脉冲序列输入型。RS-485通信型没有无安装板的型号。
5相步进电动机用驱动器
CVD系列 全闭环控制型
5相步进电动机用DC电源输入驱动器。
结合外部传感器,可以实现亚微米级的高精度定位操作。
有助于满足需要更高精度控制的设备和设备设计需求。


2相/5相步进电动机用驱动器
CVD系列 多轴型 EtherCAT对应
支持EtherCAT通信的4轴型2相/5相步进电动机驱动器。仅需一根通信电缆线即可完成输入输出信号的布线,实现了省空间与省配线的效果。另外,还可以不经过上位机器,直接获取编码器信息。

步进电动机与驱动器组合介绍

步进电动机 PKP系列/CVD系列 脉冲序列输入型驱动器
如果您希望通过脉冲序列输入轻松操作步进电动机,该电动机和脉冲序列输入型驱动器可以满足您的需求。我们追求高效率、高转矩、低振动,进一步提升了性能。
步进电动机 PKP系列/CVD系列 RS-485通信型驱动器
如果您希望通过Modbus(RTU)控制来操作步进电动机,或者使用触摸屏轻松设定数据,这种电动机和RS-485通信对应的驱动器可以满足您的需求。您可以最多连接31轴驱动器到一台上位机器并进行控制。

5相步进电动机 PKP系列/CVD系列 全闭环控制型驱动器
通过与外部传感器组合,在保持步进电动机易用性的同时,实现亚微米级的高精度定位。有助于需要更高精度控制的设施建设和设施设计。
型号筛选·购买
