Q.AZ系列 多轴驱动器和基恩士PLC在使用。原点返回应该如何执行呢?
适用产品名称
东方马达AZ系列 多轴驱动器MECHATROLINK-Ⅲ对应: AZD2A-KM3、AZD2B-KM3、AZD3A-KM3、AZD4A-KM3
基恩士PLC(定位/运动控制单元) : KV-XH04ML、KV-XH16ML
原点返回的执行有以下的两种方法。请执行其中一种。
-
定位运动单元的原点返回
将定位/运动控制单元的原点返回要求继电器[先头继电器编号+310+400×(轴编号-1)]设置为ON并执行。
原点返回的方法请选择基恩士 KV STUDIO的原点返回方法。
各个设置的详细情况,请参考基恩士的说明书。
- Z相存在的情况下,停止时ZSG不一定为ON。
-
在原点返回运行中,如果将RV-BLK(或FW-BLK)设置为ON,则会在ON状态下禁止反转方向运行(或正转方向运行),驱动器的POWER、ALARMLED会闪烁2次。
在RV-BLK(或FW-BLK)解除后,闪烁会停止。
如果想要关闭LED的闪烁,请使用我公司的支援软件MEXE02更改设置。

-
如果轴构成设置中选择「步进」,则不能使用挡块(压入)。
如果想要进行挡块式(压入),请参阅以下FAQ。
-
通过高速原点移动回归原点
AZ系列搭载有ABZO编码器(免电池的绝对编码器)。
因此,可以实现不使用传感器的原点返回(高速原点移动)。进行高速原点移动时,需要预先确定原点。
请执行「1. 定位/运动控制单元的原点复归」或预设原点的位置。
如果通过预设来确定原点位置,请参阅以下FAQ。
<补充>
AZ系列多轴驱动器搭载了「东方马达固有的方式」的原点返回功能。
但是,由于这种方法需要切换定位/运动控制单元的模式,因此推荐使用上述的1或2的方法进行原点返回。
作为参考,以下介绍使用「东方马达固有的方式」进行原点返回的手顺。
执行时,将定位/运动控制单元的控制切换到MECHATROLINK-Ⅲ的命令模式,并发出原点返回命令(ZRET:3Ah)来执行。
通过伺服命令输入输出信号(SVCMD_IO)的31位(VSO16)的设置,决定使用原点返回命令时,原点返回的方法。(0时:MECHATROLINK-Ⅲ的标准方式、1时:东方马达固有的方式)
伺服命令输入输出信号(SVCMD_IO)
原点返回所需的参数,请使用我公司的支援软件 MEXE02进行设置。(使用基恩士 KV STUDIO的注册监视器进行说明。CPU模块为KV-7500、定位/运动控制单元为KV-XH04ML,先头地址为R34000。)
-
①
-
将操作许可继电器[先头继电器编号+400×(轴编号-1)]设置为ON。

-
②
-
将控制模式更改(#2101)设置为400:MECHATROLINK-Ⅲ 命令模式,并将控制模式更改要求继电器[先头继电器编号+505×(轴编号-1)]设置为ON。
作为响应,控制模式更改完成代码#119为400,控制模式更改完成继电器为ON。控制模式更改完成继电器
-
KV-XH04ML时
-
先头继电器编号+2305×(轴编号-1)
-
KV-XH16ML时
-
先头继电器编号+7105×(轴编号-1)

-
③
-
控制模式更改完成继电器为ON后,将控制模式更改要求继电器设置为OFF。

-
④
-
将SVCMD_IO(#2134、#2135)的31位(VSO16)设置为1(东方马达固有的方式),并将增益切换继电器[先头继电器编号+506×(轴编号-1)]设置为ON。
如果使用MECHATROLINK-Ⅲ的标准方式,则设置为0。

-
⑤
-
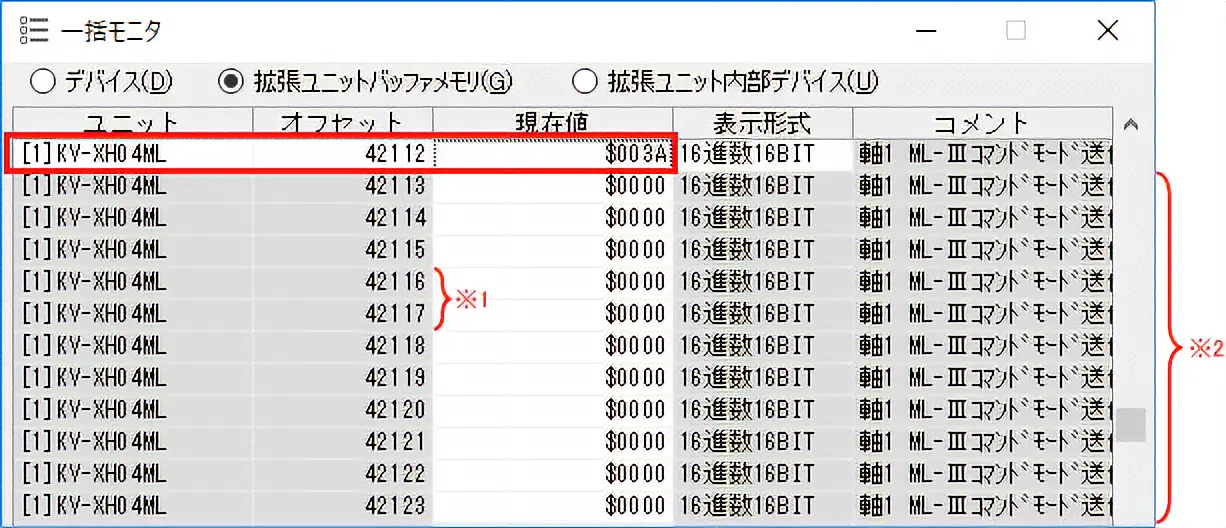
使用一括监视器,将ML-Ⅲ命令模式发送数据的0字节、1字节(#42112)设置为伺服ON命令(31h)。

-
⑥
-
将ML-Ⅲ命令通信要求继电器[先头继电器编号515×(轴编号-1)]设置为ON。
ML-Ⅲ命令通信完成继电器会变为ON。
-
KV-XH04ML时
-
先头继电器编号+2315×(轴编号-1)
-
KV-XH16ML时
-
先头继电器编号+7115×(轴编号-1)

-
⑦
-
为了发送下一个命令,请将ML-Ⅲ命令通信要求继电器设置为OFF。

-
⑧
-
将ML-Ⅲ命令模式发送数据的0字节、1字节设置为原点返回命令(3Ah)。
-
※1
-
本来应该是在原点返回命令的这个区域对应SVCMD_IO的设置区域,但实际上即使在这里设置数据,也无法设置SVCMD-IO。
要设置,需要使用④的增益切换继电器进行设置。
-
※2
-
如果是东方马达固有的方式,则不需要设置。
如果是MECHATROLINK-Ⅲ的标准方式,则需要设置。
-
⑨
-
将ML-Ⅲ命令通信要求继电器设置为ON,以执行原点返回。

-
⑩
-
为了发送下一个命令,请将ML-Ⅲ命令通信要求继电器设置为OFF。

-
⑪
-
将控制模式切换回位置控制模式。请使用②③的操作将#2101设置为0并执行。
产品类型: 网络对应产品・控制器、αSTEP・步进电动机
机型、系列: AZ系列、MECHATROLINK-Ⅲ
内容: 使用方法・设定方法
FAQ No: 480
若疑问未得到解决,可与我们联系咨询。
这篇常见问题解答对您有帮助吗?
如果您有其他意见或建议,请在此填写
验证码计算: