AGV・AMR(搬运机器人)的选用条件是什么?
本专栏将针对选用 AGV 和 AMR 的必要条件,介绍各条件与选用计算的关联。
选用搬运机器人用电动机的必要条件
与重量相关的要素
-

①设备条件中的重量,是决定电动机的必要转矩和容许惯性惯量的必备要素喔。还有,停止时的耐负载性能由容许径向负载决定。通过平行轴减速机提高容许径向负载是有极限的,所以对于想要提高耐负载性能的客户,推荐中空轴扁平减速机或法兰盘输出头。法兰盘输出头组装时为1500N,中空轴扁平减速机最大2040N,是具有高强度。
侧面安装 中空轴扁平减速机 
顶部安装 法兰盘输出头 
-
关于行驶环境
关于搬运轴数
-
搬运轴数是指驱动所需电动机的数量。使用的电动机数量不同,所需的转矩也会变化。搬运机器人通常采用2轮驱动。一般会以2个轮胎进行驱动,并在周围配置4个轮胎来分散载重。采用2轮驱动的话,可以灵活转弯等,可以根据搬运机器人的行驶场所考虑各种设计方法。
2轮驱动示意图 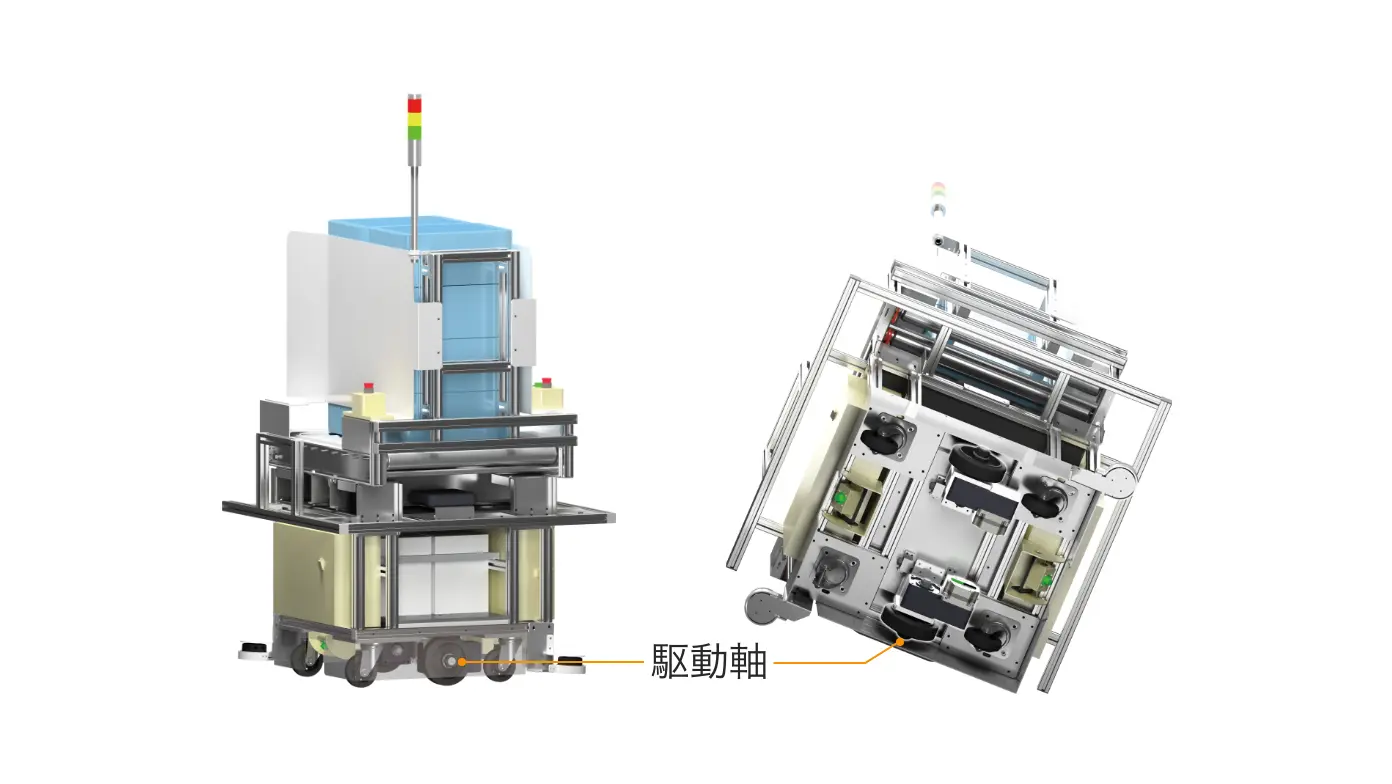
-
关于电源电压
行驶速度相关要素
本次要点
- 选用搬运机器人时需要的设备条件和运转的条件
- 装置条件包括重量、行驶环境、搬运轴数和车轮直径、电源电压,是选定计算中必要的要素