真机实例集----SCARA机器人(水平多关节机器人)
装置概要
使工作物的取放及工程间搬送自动化的自制SCARA机器人。运用于将以往需要人手工进行的连结、计测、组装自动化的产线中。在有限的空间中实现取放及工程间搬送。
系统构成

机器人控制器 MRC01
在现有系统中轻松导入自制机器人
通过EtherNet/IP™直接控制MRC01与上一级系统的协作。
无需对现有设备的控制系统进行较大更改,即可轻松追加导入自制机器人。
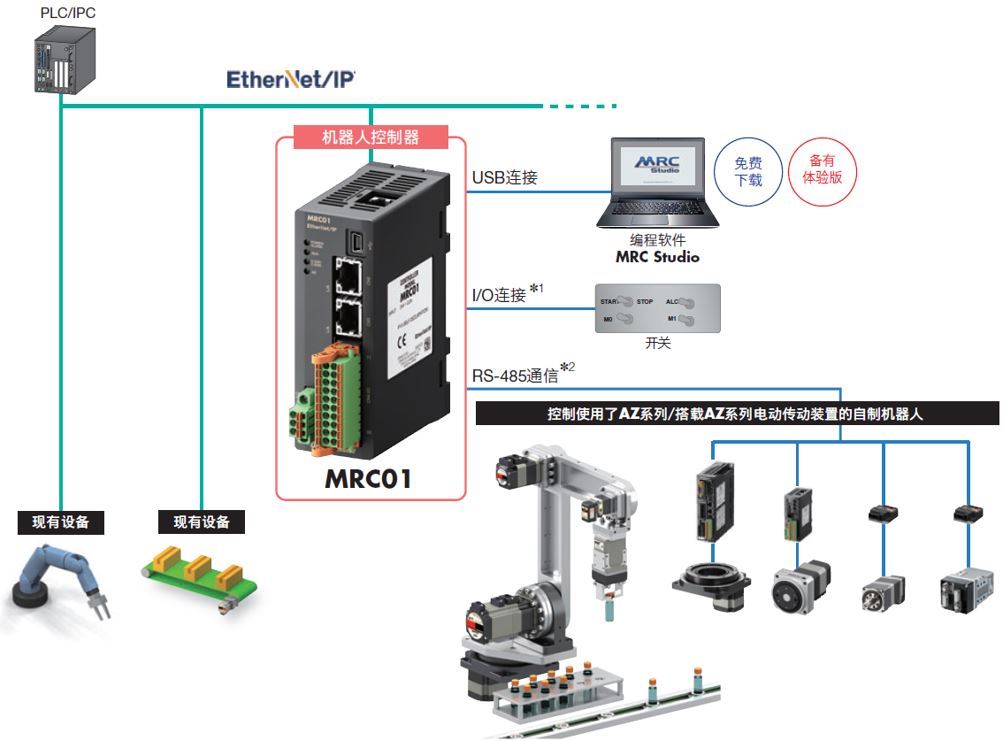
✽ 1 MRC01也可通过I/O连接(无上一级设备)运行。
✽ 2 MRC01和AZ系列的驱动器之间通过RS-485通信进行控制。
即使是第一次使用也能简单设置
MRC01即使没有编程语言等专业知识,从初始设定到运行编程也可简单设定。以向导形式轻松进行机器人类型的选择和机构信息的输入等一系列初始设定。也可边通过示教操作运行自制机器人,边在运行程序中追加目标指令。
由于可通过1个指令完成复杂的设定所以即使新手设备设计者初次使用也能在较短的时间完成编程。
●编程软件
MRC Studio、EDS文件可从官方网站下载。
-

-
●视频介绍
在线3D模拟中确认动作
可在3D模拟器上确认机器人的工作程序。
运行实机前,可对程序进行简单的检查。
模拟运行无需连接上位PLC。可将“运行方向错误”
“过度运行导致机器人损坏”等问题防患于未然。
✽ 不能在脱机时使用。

可控制末端执行器轴
可对应工业用机器人中具有代表性的:垂直多关节机器人、SCARA机器人、直交机器人。
末端执行器轴也可通过MRC01控制,有助于系统整体的省空间、省配线及省成本。

可对应丰富的产品

AZ系列及搭载了AZ系列的电动传动装置。产品种类丰富,机器人设计自由度高有助于配合自制机器人。


●搭载AZ系列的电动传动装置 ---------------------------------------------------------------------






注意:
*本资料仅供参考。选购前请仔细确认设备需求和产品规格。
*如需帮助,请洽询本公司客户咨询中心(电话:400-820-6516)。
*启动机器人前客户应负责事先对机器人实施充分的安全确认。
*对于机器人系统整体的安全性,本公司不承担任何责任。
*需要客户按照实际使用条件进行编程,本公司无法提供编程服务。
系统构成

搭载αSTEP AZ系列的产品
机械式多回转绝对式编码器,实现无需电池及外部传感器
αSTEP AZ系列无需原点传感器等外部传感器,有助于节省配线及小型化。采用机械式多回转的绝对式编码器:ABZO编码器,即使定位运行中电源因非正常停止或停电而被切断,也能保持位置信息。位置信息由ABZO编码器以机械方式管理,因此无需电池。也就无需考虑购买电池的成本、运行时电池相关的问题及更换电池的时间。而且,AZ系列的电动机自身可代替传感器、数值化监控机器人状态。

适用于关节轴 中空旋转式传动装置和小型减速机型
●中空旋转式传动装置DGⅡ系列(轴1、轴2)
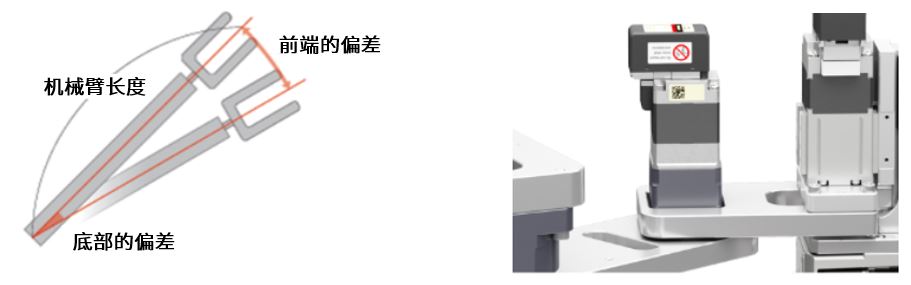
SCARA机器人在抓取离开轴1较远的机械臂前端的工作物时,会产生大负载转矩。
DGⅡ系列高刚性的交叉滚子轴承与中空旋转平台一体化,实现高容许转矩。因此有助于扩大机械臂的可动范围。
而且,大口径中空孔(贯穿)可用于布线复杂的配线与配管等场合,使装置设计更为简洁。

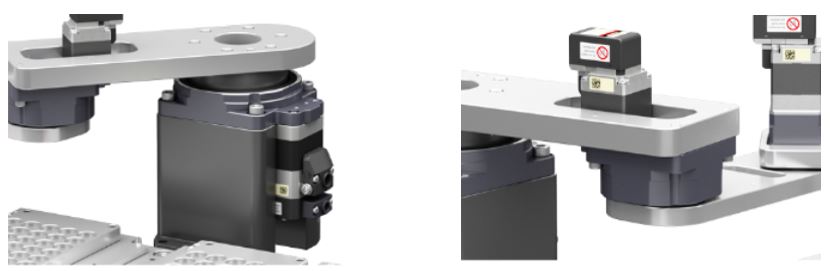
●αSTEP AZ系列 HPG减速机型(轴3)
即便是细小偏差在机械臂的前端也会变大,有可能导致无法正确抓取工作物。
HPG减速机型无齿隙,可抑制偏差,准确完成动作。
降低机器人前端的负担的小型·轻量传动装置
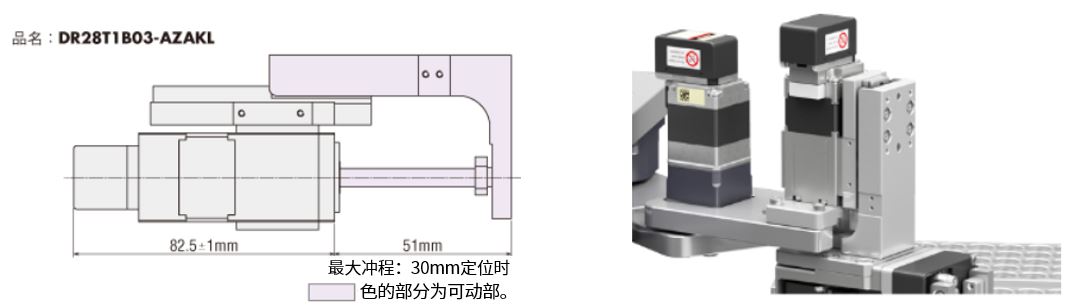
●小型电动缸 DR系列(轴4)
αSTEP AZ系列与滚珠螺杆一体化的小型化机身,有助于装置的小型化·省空间化。通过装置前端的轻量化,提升设计自由度。
●电动夹爪 EH系列(轴5)
末端执行器小型·轻量可减轻各关节的负担,有助于机器人整体的小型化、降低成本。
电动夹爪可自由设定位置·抓持时间·抓持力。可实现各种各样的抓持动作。

相关产品

闭环控制系统αSTEP,
搭载无需电池就能实现绝对方式定位的机械式绝对编码器。
驱动方式有脉冲序列型和可实现I/O控制的内藏定位型供选择。
产品种类丰富
中空旋转式工作台和αSTEP的一体化产品
(搭载无需电池的绝对式编码器AZ系列)。
传动装置内部为减速机构,因此可进行高输出功率驱动。

滚珠螺杆与步进电动机组合的直动机构传动装置。
实现了装置的小型化、轻量化。

齿条·齿轮机构与AZ系列组合成了电动夹爪EH系列。
实现如同人指般的精细“抓取”,帮助实现自动化、节省人力。
注意:
本资料仅供参考。选购前请仔细确认设备需求和产品规格。
如需帮助,请洽询本公司客户咨询中心(电话:400-820-6516)。
这篇解决方案对您有帮助吗?
如果您有其他意见或建议,请在此填写
- ※请注意,我们将不会针对您填写的内容进行个别回复。
验证码计算: