步进电动机的基础与最新技术动向
介绍在机械设计临时增刊号上发表的文章。
步进电动机通过开环控制可以轻松实现高精度定位。这是因为电动机具有高机械精度。由于系统结构简单,因此被广泛应用于各种用途。
另一方面,当齿轮、滚珠丝杠等机构组合在一起时,会受到送丝螺距误差、齿隙、空转、温度变化等因素的影响。因此,对排除电动机与机械端之间机械部件的影响,实现更高精度定位的需求正在增加。
解决方案之一是,将安装在机械端的旋转编码器或线性编码器的位置信息反馈给驱动器,并对目标位置进行校正的全闭环位置控制。通过这种方式,可以使用步进电动机实现更高精度的定位。本文将使用“CVD系列 全闭环控制型”来解释步进电动机的结构、特征等基础知识以及步进电动机驱动器的最新技术趋势。
步进电动机的基础
步进电动机的运动
步进电动机根据脉冲信号以一定角度旋转。因此,当脉冲信号快时,看起来像连续旋转,当脉冲信号慢时,就像时钟的秒针那样间歇性地旋转。
基本结构
步进电动机由绕有线圈的定子(固定子)和装有永久磁铁的转子(回转子)组成(图1)。
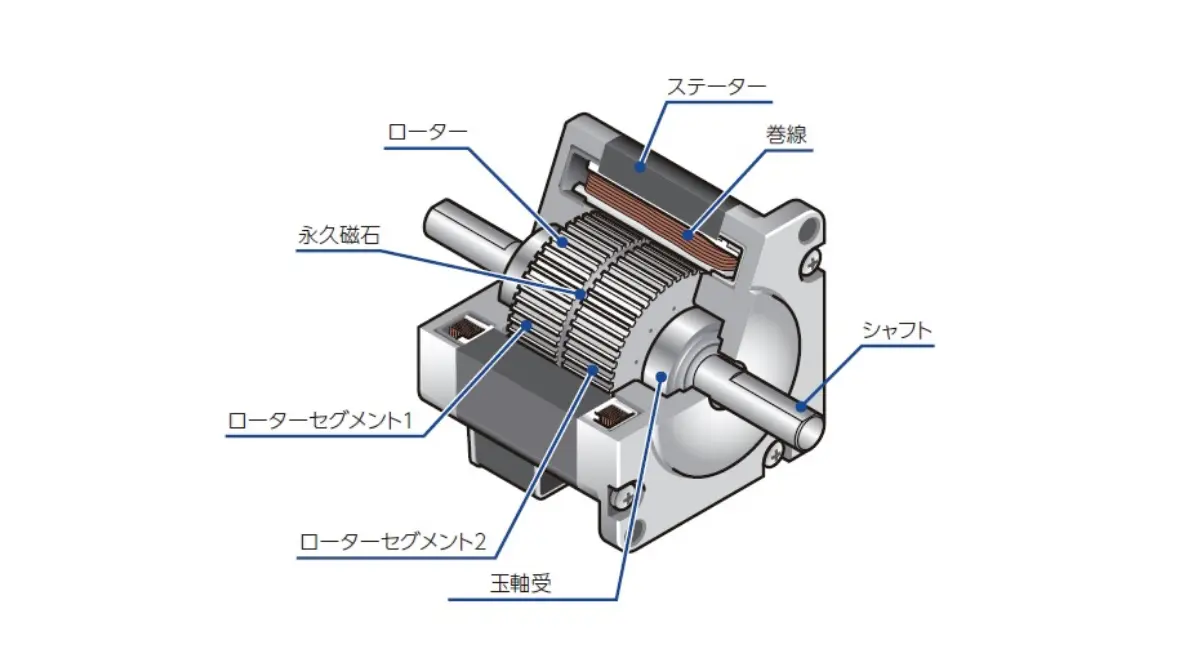
定子和转子都设有凹凸形状的小齿,并且以一定的间隔排列。通过这些小齿实现了高精度的定位。在保持小齿获得的的高分辨率的同时,通过磁铁获得了高转矩。
旋转原理
东方马达有两种步进电动机,一种是基本步距角为1.8°的2相步进电动机,另一种是基本步距角为0.72°的5相步进电动机。以下以2相步进电动机为例进行说明。
要使电动机旋转,可以利用定子和转子的小齿之间的磁力。将电流从A线圈切换到B线圈,转子将旋转1.8°,并在小齿对准的角度停止(图2)。通过重复这个过程,就像时钟的秒针一样以一定的角度旋转。
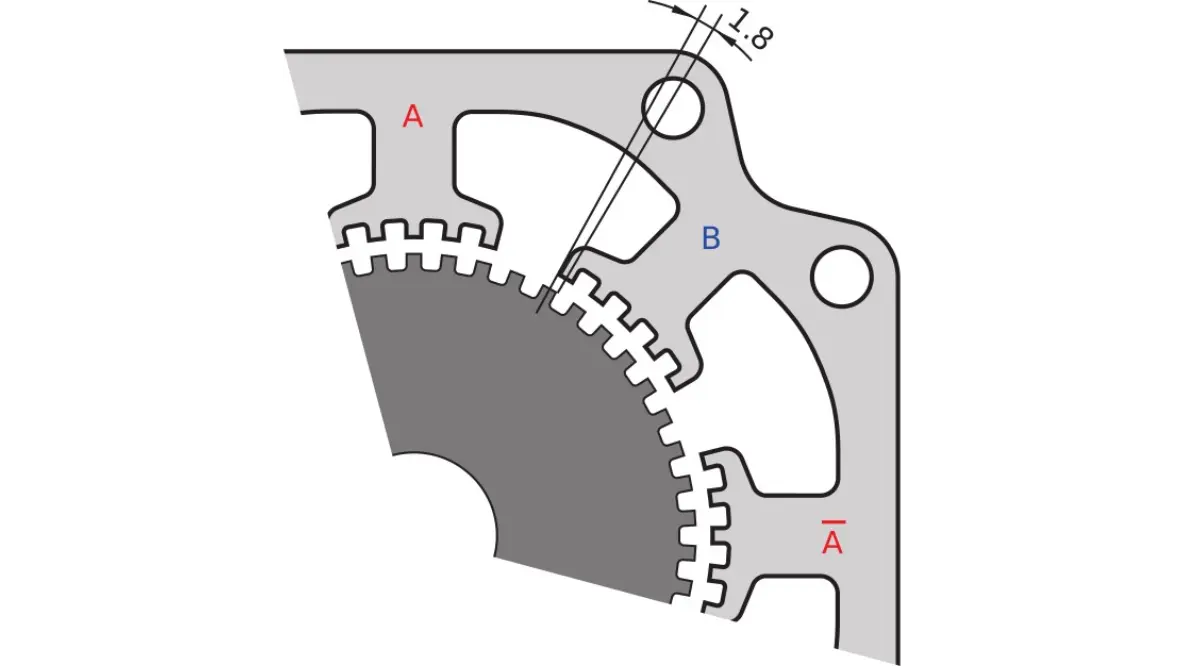
步进电动机通过小齿的机械配置以决定的角度旋转,因此无需传感器即可进行定位运行。
系统构成
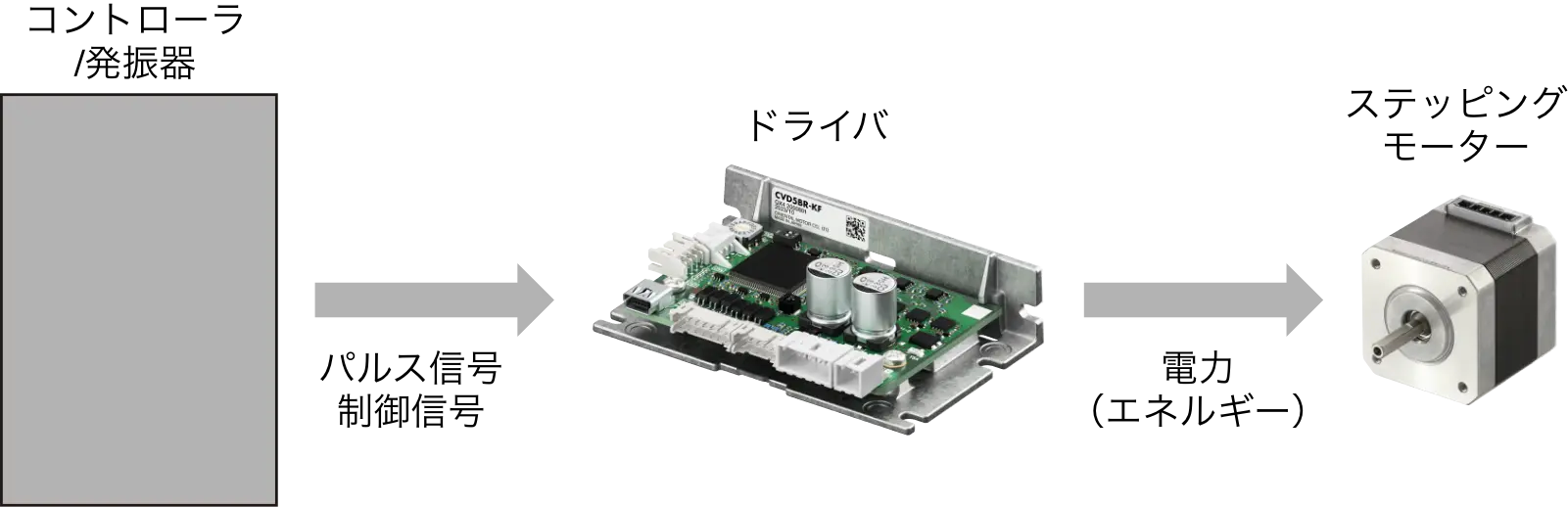
要驱动步进电动机,需要控制器、驱动器和电动机这三个部分,其中控制器通过脉冲信号发出操作指令,驱动器为电动机供电,电动机将电力转换为动力,并按照指令旋转(图3)。
旋转量与转速
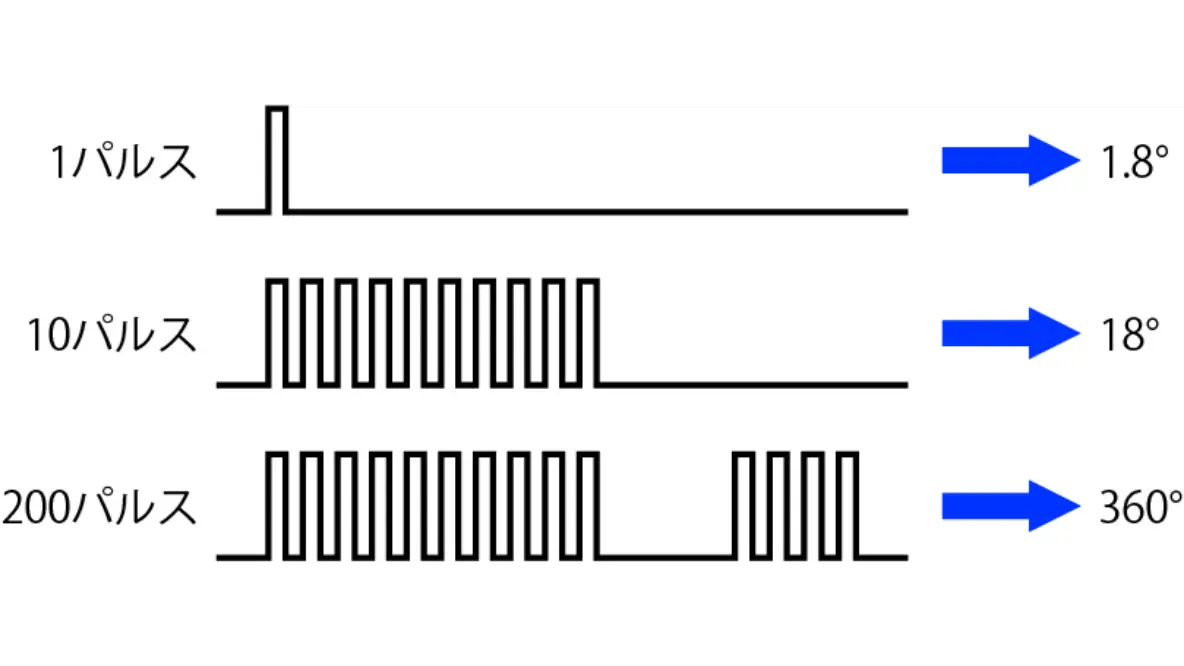
步进电动机根据控制器输入到驱动器的信号,每输入一个脉冲就会旋转一定的角度。旋转角度与脉冲数成正比。
以基本步距角为1.8°的2相步进电动机为例,输入200个脉冲,旋转角度为1.8°×200=360°,轴旋转1圈(图4)。
另外,每秒的脉冲数称为脉冲速度,单位是Hz。转速与脉冲速度成正比。
步进电动机的特征与应用要点
静止角度误差
以任意点为原点,旋转1圈,实际停止位置与理论停止位置之间的差称为静止角度误差。代表产品中,误差在±3分(0.05°)以下。即使重复旋转,误差也不会累积,因此可以实现高精度的定位。
停止状态下的位置保持
步进电动机即使在停止状态下,也会通过保持一定的电流流动来产生保持力。只要外力不超过这个保持力,就不会旋转。这对于定位用途来说是一个很大的优点。
同步运行
步进电动机根据输入的脉冲旋转。由于对指令的高度响应,它也适用于微动运行和同时处理多个工件的同步操作。
负载变化
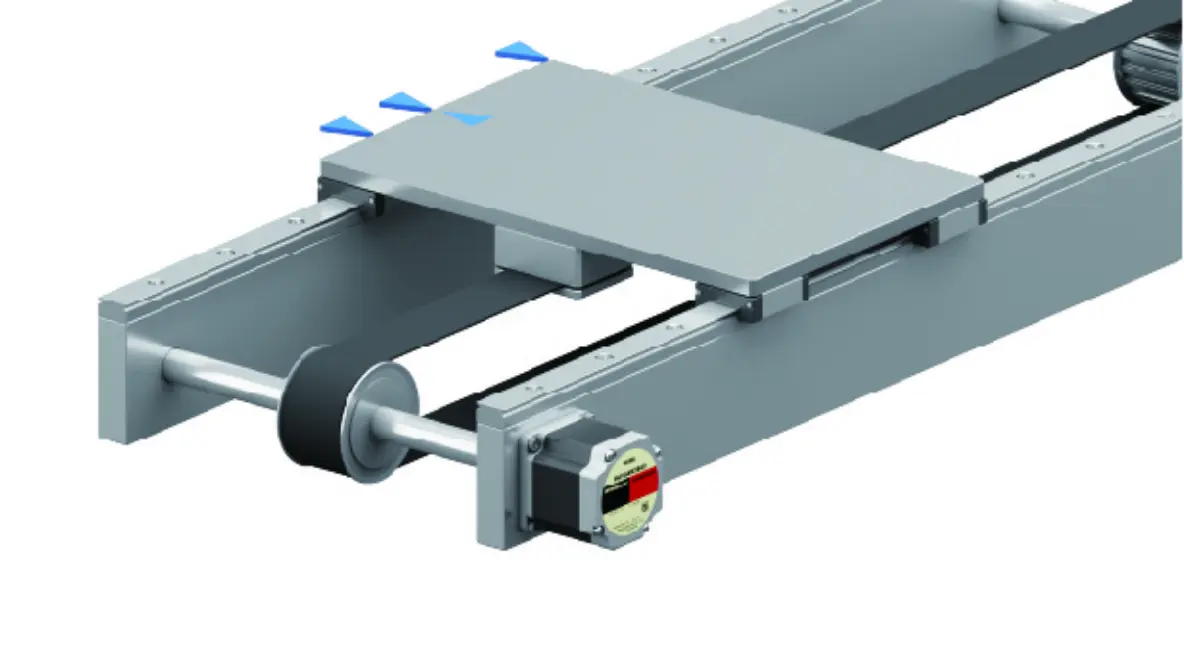
步进电动机由于供给到电动机的电流始终一定,因此产生的转矩也一定。即使转动惯量和摩擦负载发生变化,也会根据产生的转矩进行旋转。因此,无需像伺服电动机那样根据工作进行调整增益。由于这个特征,适用于负载变化大的皮带轮(图5)和拾取和放置等动作的自动化。
步进电动机的种类
步进电动机以单独的标准型为基础,有各种型。东方马达拥有从电动机尺寸、预先安装了高精度齿轮的减速机电动机、带电磁制动、带编码器的广泛产品系列。
驱动器的角色
驱动器的角色
驱动器是控制步进电动机线圈中电流的方向和顺序的驱动电路,根据输入的脉冲数量和速度,进行电动机电流的切换控制。由于驱动器的组合也会改变电动机特性,因此是重要的组成部分。
旋转的角度由步进电动机的机械结构决定,但需要比基本步距角更小的角度时,可以通过电气回路细分步进角度。
微步驱动
通过控制线圈中电流的分配,可以实现步进角度的细分,从而实现更高的分辨率。这称为微步驱动。因此,CVD系列可以实现低振动、低噪音的平稳旋转。
使用全闭环进行位置校正
全闭环控制的必要性
使用步进电动机的系统是通过脉冲的数量和速度来决定电动机的动作。其特征是结构简单,易于构建。没有动作的反馈,这称为开环控制。
当齿轮、滚珠丝杠等机构组合在一起时,会受到电动机与机械端之间机械部件的影响。当需要更高精度的定位时,需要确认机械端(舞台、工作台或工作本身的位置)进行操作。
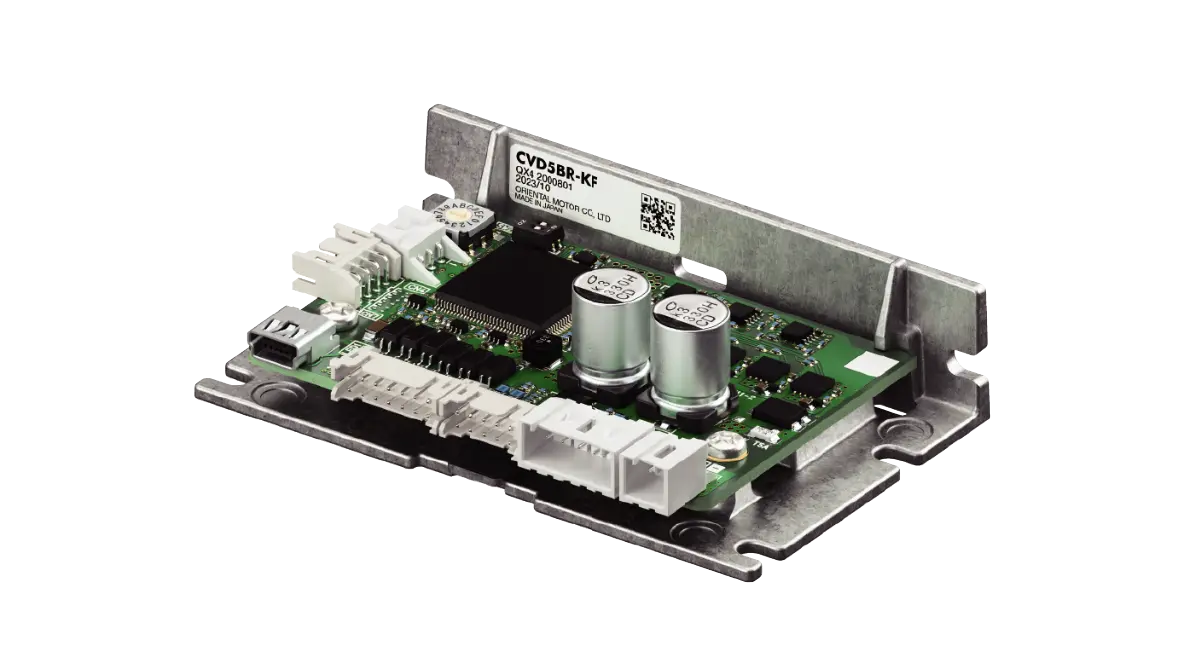
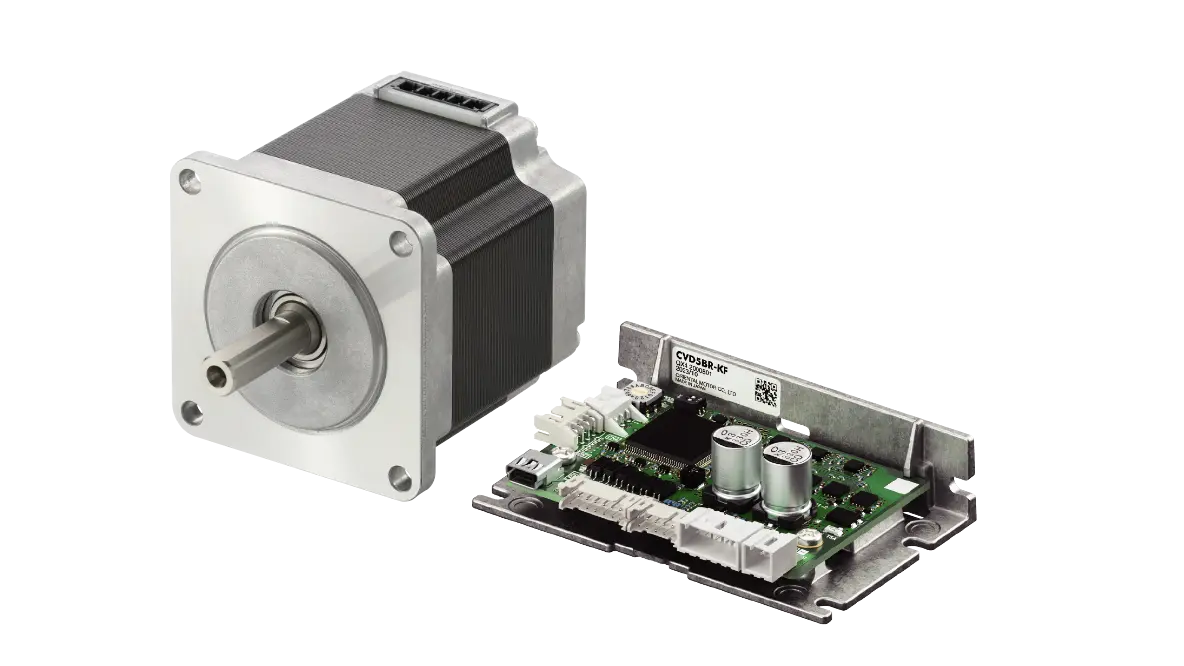
CVD系列 全闭环控制型的特征
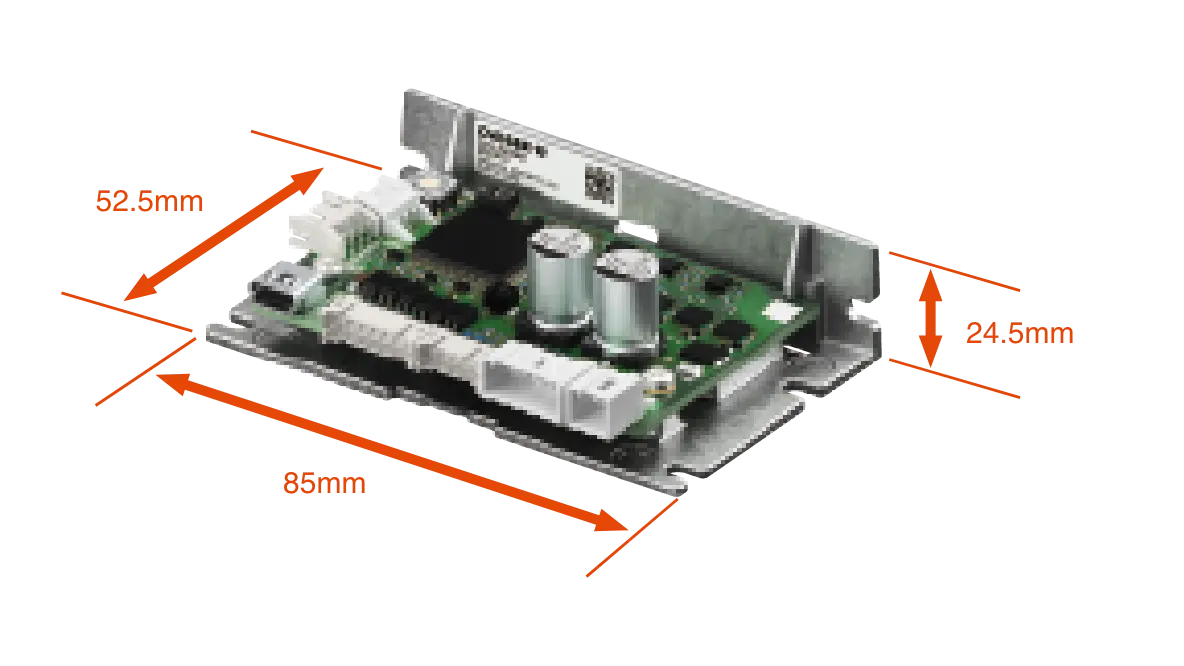
CVD系列 全闭环控制型(图6)通过机械端安装的编码器的位置反馈进行全闭环控制,从而实现位置校正。这使得可以实现高精度的定位。为了满足低振动和高精度的要求,我们使用了专门为基本步距角为0.72°的5相步进电动机设计的驱动器。它使用DC电源输入,可以选择连接器的拔出方向。
特征
- 通过检测机械端,可以实现高精度的定位
- 校正指令位置与外部编码器的检测位置之间的差异
- 对指令的同步性好,响应性好
- 无需根据负载进行调整增益
- 停止时没有微振
系统构成
CVD系列 全闭环控制型需要直接检测机械端的外部编码器。作为外部编码器,可以使用增量式线性编码器或旋转编码器。电动机本身没有安装编码器。(图7)
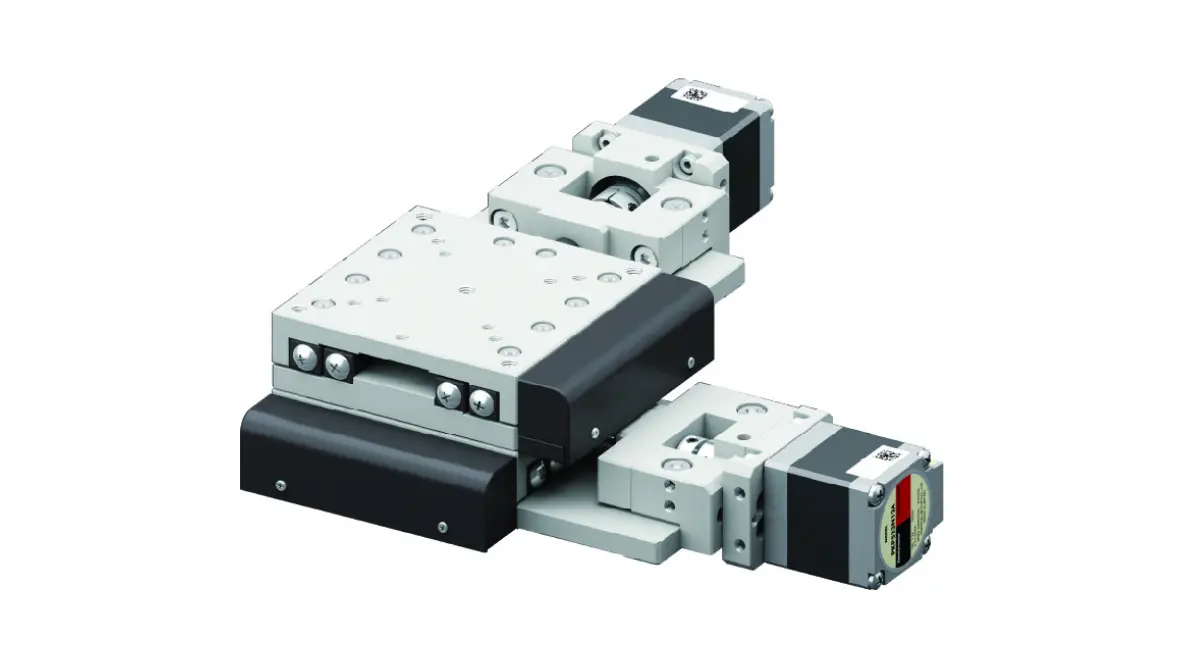
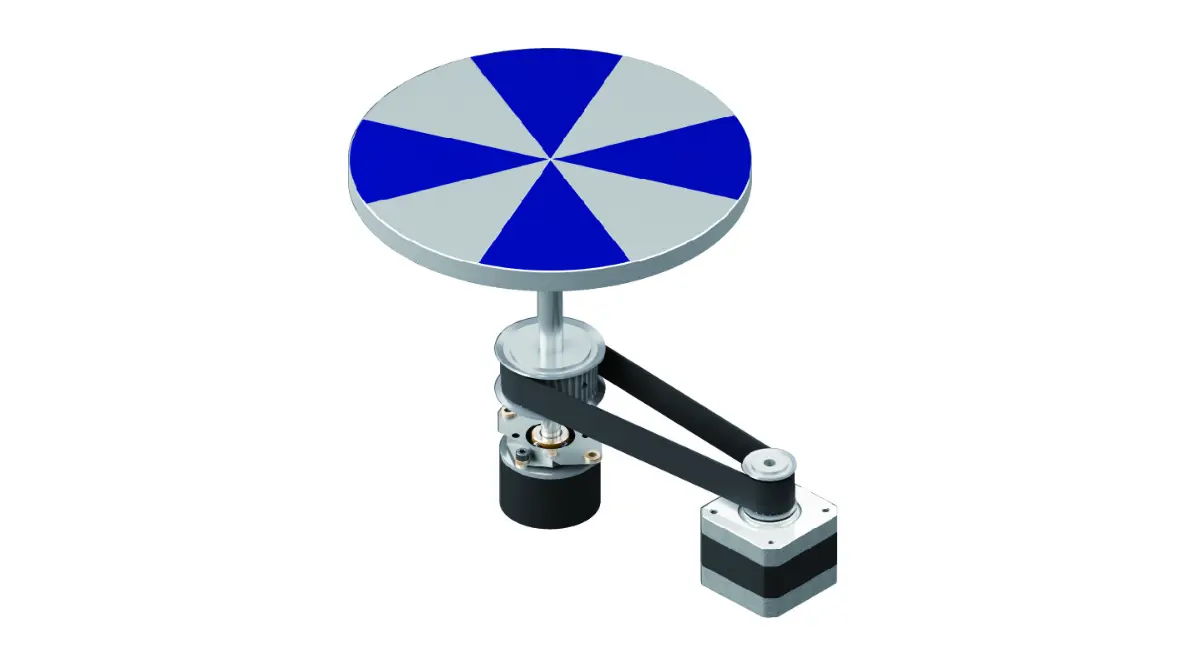
图7:使用外部编码器时的机构示例
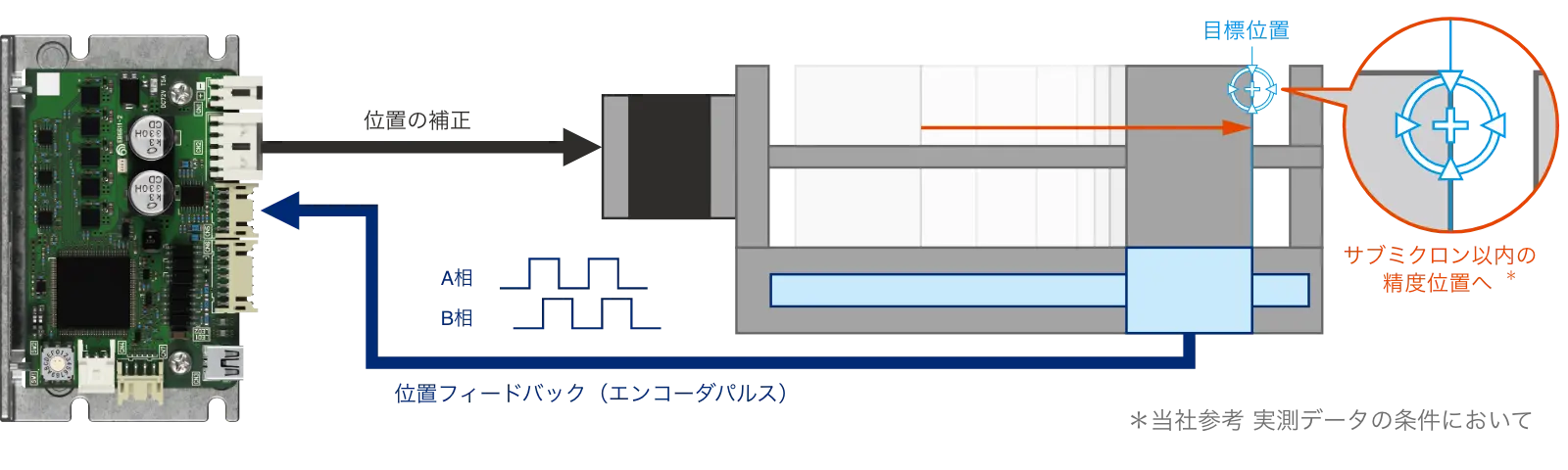
驱动器将指令位置与检测位置的差异(位置偏差)进行校正。由于在机械端进行位置检测,因此可以消除电动机与机械端之间的机械部件的影响,实现高精度的定位。检测位置的精度取决于编码器的分辨率和编码器的安装精度。(图8)
使用全闭环控制进行定位运行
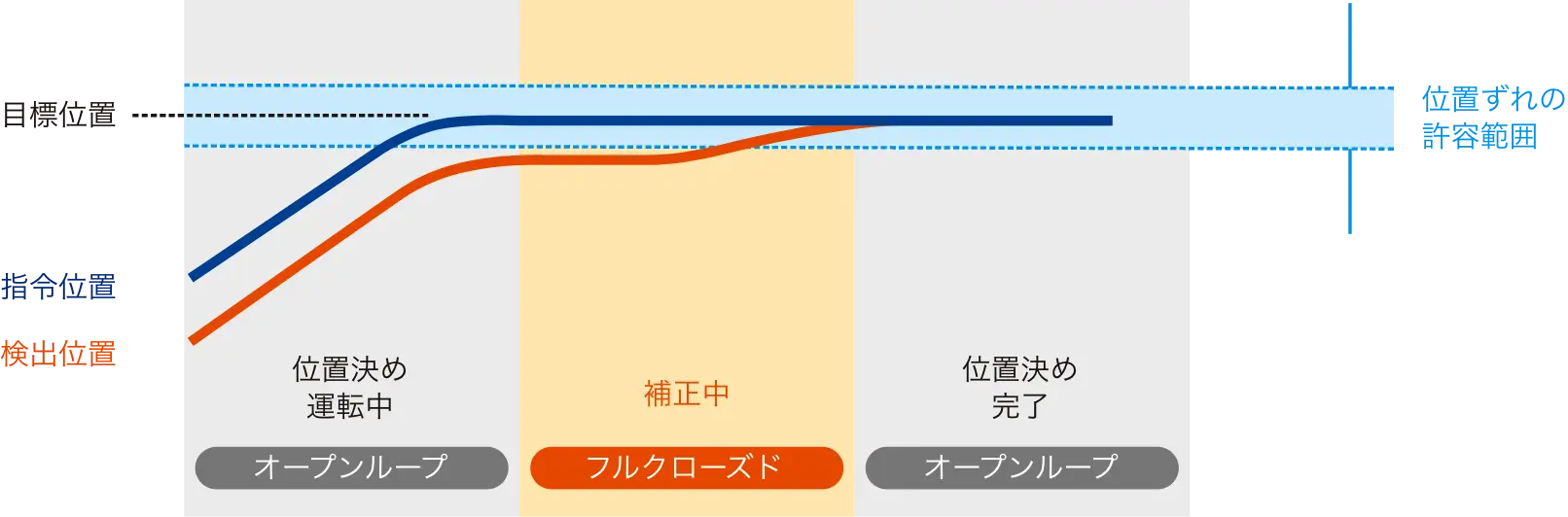
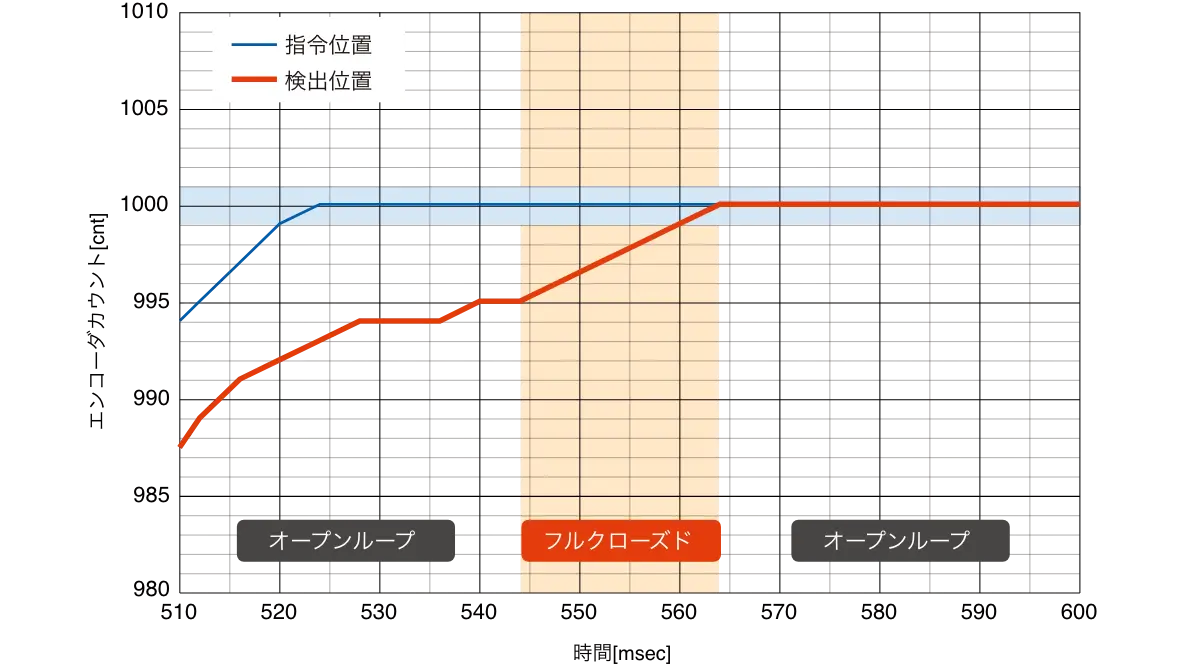
有校正操作时的定位运行分为三个阶段。(图9)
① 定位运行中
当操作指令输入时,将进行开环控制操作。与一般步进电动机相同,利用其良好的响应性。
② 校正中
驱动器预先设定定位的容许范围(就位范围)。在操作停止后,如果机械端的检测位置超出容许范围,则自动进行校正操作,校正外部编码器获得的检测位置与指令位置之间的位置偏差。
③ 定位完成中
当进入容许范围后,再次返回开环控制。
使用外部编码器的全闭环控制中,直接检测机械端的位置,并将位置反馈给驱动器。即使电动机与机械端之间的刚性影响或外部转矩,也可以进行校正,因此可以在目标位置停止。对于机构部分的温度变化引起的膨胀等影响,再现性好是其特征。(图10)
保持步进电动机定位控制的便利性,通过外部传感器组合,可以实现高精度的定位运行。有助于需要更高精度定位的设备。
从产品选择阶段开始支持设备设计
- 专职工作人员将代替客户选择电动机。
- 我们备有关于公司内部制造设备的规格和外形尺寸的资料。
详情请通过电话或在线咨询。