在选型以及控制AGV/AMR用电机时,所需要的【车轮信息】有哪些?
本篇将会介绍在选型以及控制AGV/AMR用电机时,所需要的【车轮信息】有哪些。

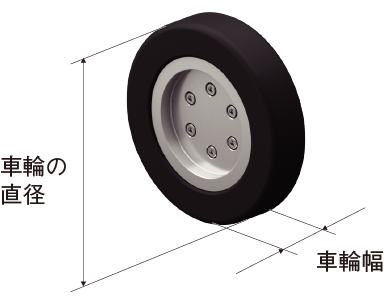
选择电动机与车轮宽度
选用条件
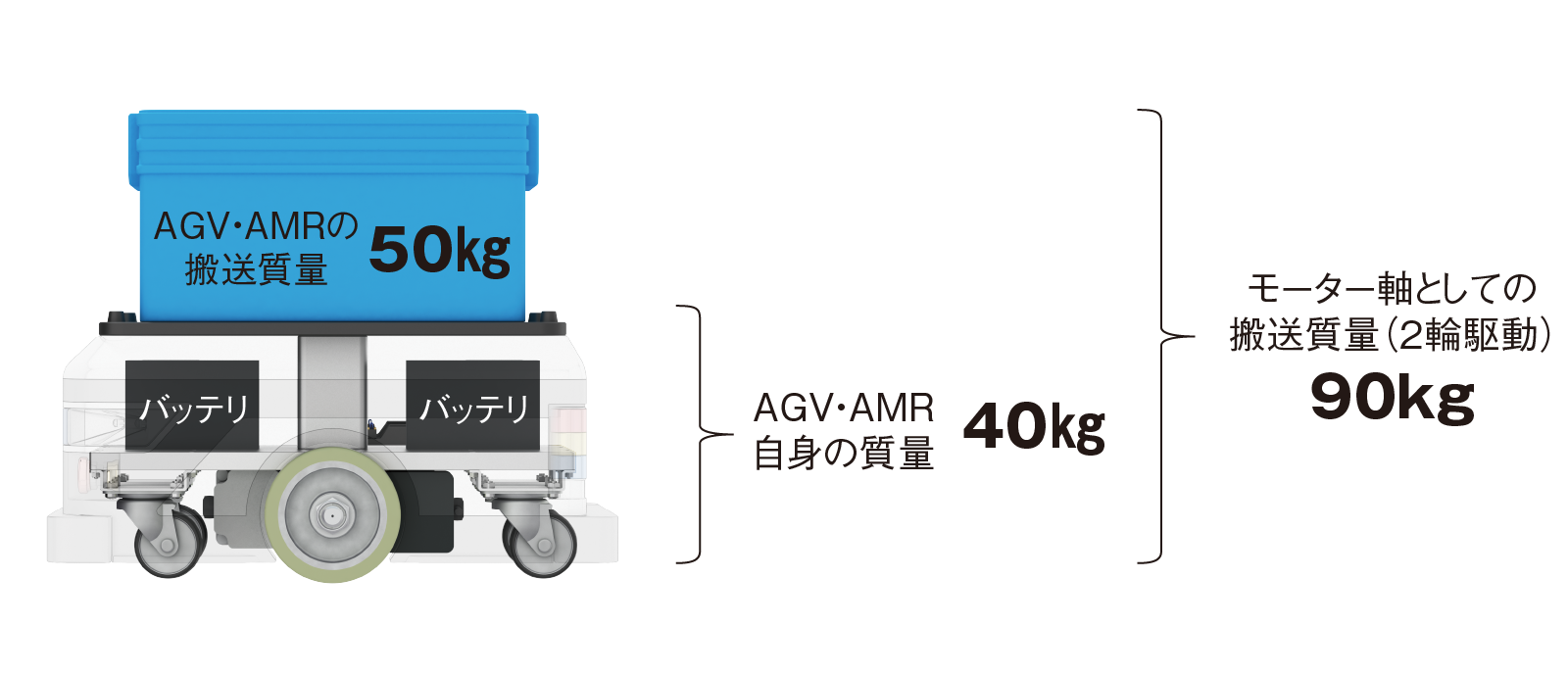
| 运转条件 | 搬运质量 | 50㎏ |

|
|---|---|---|---|
| 搬运速度 | 30m/min | ||
| 台车效率 | 0.9 | ||
| 外力 | 0N(无) | ||
| 加速时间 | 固定为2s | ||
|
惯性 惯量 |
无瞬时停止 | ||
| 安全率 |
2以上 (负载、瞬时最大) |
||
| 路面 | 平坦、无倾斜 | ||
| 预设的车轮条件 | 车轮直径Φ | 100mm |
|
| 车轮宽度 | 32mm | ||
| 橡胶密度 | 1.2 | ||
| 摩擦系数 | 0.1(与路面的摩擦系数) |

选用结果
| 电动机 | BLMR460SHK-GFV | 输出[W] | 60W |

|
|---|---|---|---|---|
| 减速机 | GFS4G30FR | 减速比 | 30 | |
| 减速机/电动机 | 质量 | 2.1㎏ | ||
| 电动机轴作为搬运质量 | (2轴驱动) | 90㎏ |
|
|
| 搬运速度 | (最大可搬时) | 30m/min | ||
控制所需的机构车轮信息





本期重点
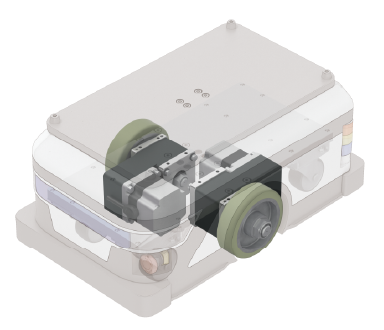
- 选用搬运机器人时需要考虑车轮宽度。 车轮宽度越大则惯性越大,电动机所需的转矩也会随之提高。 另外,与地面的接触面积如果越大,则抓地力也会提高,就能够稳定运转。
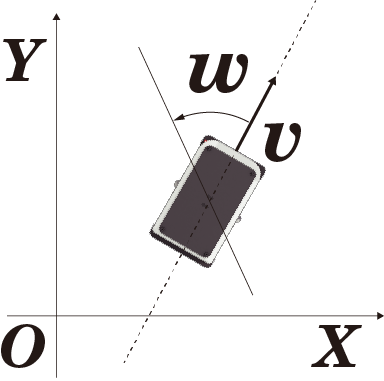
- 控制所需的机构信息有「车轮半径」「左右车轮的中心距离」「减速机减速比」这3项。 使用这3个值就可以进行坐标的转换计算来控制位置,或是在转弯时控制左右车轮的速度。
马姐达弟主题征集中

「马姐达弟」主题征集
我们诚邀您提供希望马姐讲解的主题内容!无论是想了解电动机相关的专业知识,还是日常生活中遇到的电动机疑问,都欢迎投稿。
※您提出的建议可能会被选为「马姐达弟」栏目的讨论主题。
请注意,我们无法对投稿内容逐一回复,敬请谅解。
验证码计算: