close
※还可以搜索和比较停产产品和替代产品。
近年来人工成本高涨,「以机器人取代人工作业」的需求逐渐提高了呢。
是啊。除了购买符合必要作业、动作的机器人之外,也经常听到想要自行组装特定用途的机器人。
老实说,使用自行组装机器人的客户正在烦恼「有时无法正确定位」的问题。 虽然有使用减速机电动机了…。
会不会是机构上有问题?减速机精度也有可能是原因之一。达弟,还记得齿隙是什么吗?
我没有信心能好好说明。
来,我们一起复习一下。说不定能找到解决客户问题的线索。
拜托了!
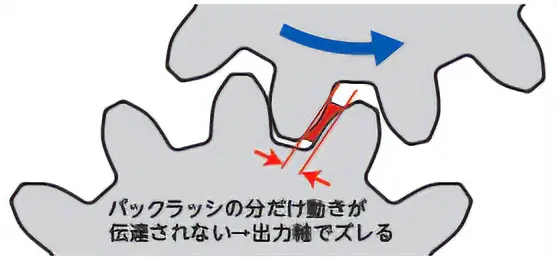
齿隙是指「齿轮与齿轮间在设计上保留的缝隙」。
缝隙听起来好像有点瑕疵,这是有必要的吗?
缝隙是必要的喔。如果齿轮与齿轮之间没有缝隙,组装时彼此是互相紧密推压的状态,则会因负载过高而无法转动。
所以才有必要设计适当的缝隙啊。
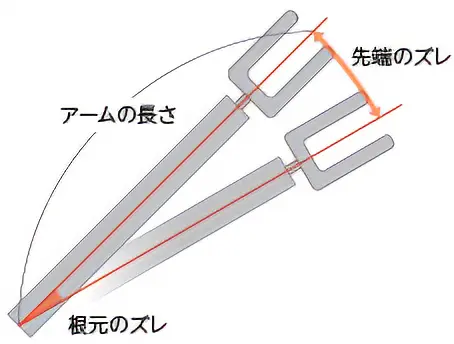
若是只往单一方向运行,相同的齿轮与齿轮会持续接触,缝隙就不会造成问题。但是,像机器人这样往复运行时,齿轮及齿轮间的缝隙,会导致无法完全到达目标位置。
原来如此。但是减速机的缝隙对设备整体来说应该微不足道吧。会怎样影响机器人呢?
你看一下图2。 看得出来电动机附近及机械手臂的前端差距很大吧。
真的呢。这是相似三角形的原理!
应该可以理解齿隙对机器人前端的差距有很大的影响了吧。 特别是机器人对精度的要求很高,因此减速机齿轮大多会使用加上斜度,或2个齿轮由双方向互夹的特殊机构,尽可能将缝隙缩减到极限的产品(小齿隙),或者使用齿轮形状本身设计为组装后无缝隙的产品(无齿隙)。详情可以查看 这里 。
好的!看来可以用这个去提案了。
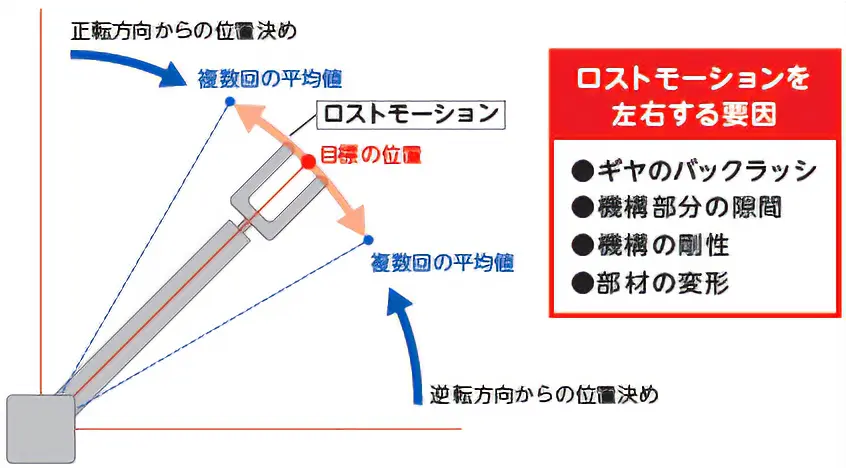
等一下。针对这次的问题,我想也需要再复习一下空转。
空转吗?
这是指使用设备测量出的「从正转方向和逆转方向定位到某个位置时的最大差」的数值。JIS规格有规定,你去查查看。
明明设计了齿隙,但又用设备来测量空转?
这是因为设备就如同此次的机器人一样,是由各种机械要素所构成的。必须考虑所有要素的影响才行。
原来如此。所以,测量空转是有必要的。
为了实现机器人的精确定位,不仅需要检查电动机,还需要检查每个部件的精度。
没错。为了尽量减少影响,建议选择减速机时尽可能选择齿隙小的产品!
这就对了。加油!
αSTEP
联系我们
扫一扫•关注我们
微信公众号
在线咨询
400电话
400-820-6516(中文)400-821-3009(日語)