close
※还可以搜索和比较停产产品和替代产品。
嗯……
你好像在烦恼什么。怎么了?
客户委托我选择索引表驱动部分使用的步进电动机。在计算惯性比的时候,用客户机构的负载转动惯量值计算了一下,结果发现惯性比太大,αSTEP AR系列也没有符合条件的电动机…。
【表(1)】
有试着用减速机型进行选用计算吗? 如果是负载惯性惯量大的机构,推荐用减速机型。 请看一下表(2)的公式。 选用减速机型的话,就可以让惯性惯量比变小。
【表(2)】
原来如此! 如果是减速机型,应该就可以用在客户的机构上了。 不过,步进电动机的减速机型有很多种类,好像很难选......
那就一个一个比较哪边不同吧。 目录上也有刊载可供简单比较的表格喔。 比如说你看下表,看得出来有哪里不同吗?
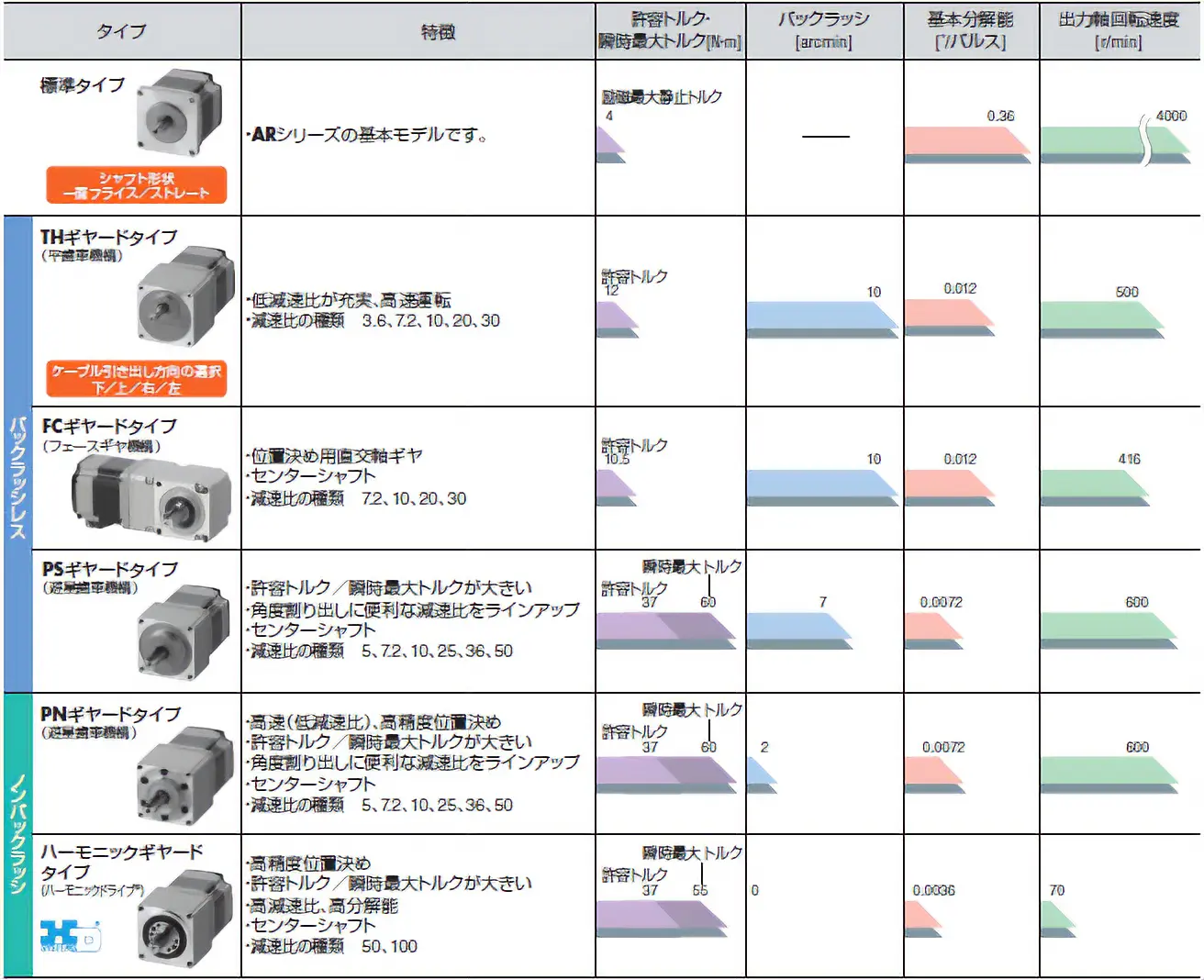
【表(3)】(点击画面可放大)
点击图片放大
嗯,容许转矩不同,还有齿隙值也不同。 我记得,齿隙就是指减速机齿轮中两个小齿之间的缝隙对吧?
是啊。 除了要确认驱动设备的必要转矩是否在容许转矩范围内,也必须确认能够确保多少安全率。 另外,有别于 AC 电动机,步进电动机相当要求定位精度,因此齿隙值会是选择时的重要因素。
原来如此! 光计算出惯性惯量比和转矩是无法选择的啊。 要确认客户的定位精度,如果对精度的要求相对严格,就推荐他们使用PN减速机或谐波减速机。 咦,不同系列的减速比种类也不同啊。 为什么会有像3.6或7.2这种不上不下的减速比呢?
提示就在步进电动机的分辨率。 比如说,达弟刚刚想选用的αSTEP AR 系列,每一脉冲能转多少度呢?
嗯,αSTEP AR系列是每脉冲0.36°吧。啊,这么一来,减速比3.6的时候,减速机的输出轴每脉冲移动0.1°,比较容易分割角度。
没错!考虑得很周到。要根据客户想要划分的角度,选择能够精确划分的分辨率,减速比也要选好。如果选择了不能精确划分的减速比,那个误差会不断累积的。
原来如此。 还必须考虑客户的转速。 我再确认一次运转条件和机构条件,重新选用αSTEP AR 系列的减速机型。
AR系列是高效率的电动机,所以在需要高频度反复定位的情况下,也能控制发热。
是啊。 因为不用在意驱动周期,我们可以提出改善装置的生产周期时间的建议。
达弟似乎也渐渐开始了解产品了,但是为了能够根据客户条件进行选择计算,还是要好好预习哦。
好的!
αSTEP
联系我们
扫一扫•关注我们
微信公众号
在线咨询
400电话
400-820-6516(中文)400-821-3009(日語)