步进电动机RKⅡ系列新技术
全数字控制的全时微步驱动器
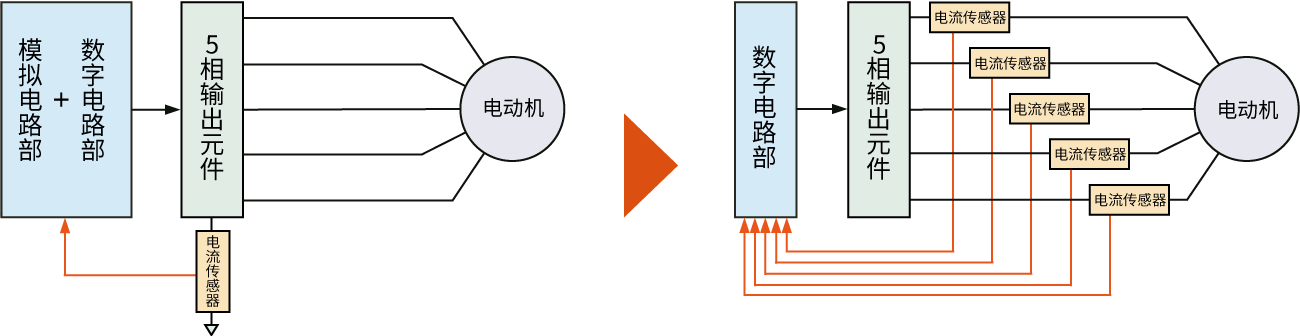
从传统的整体电流检测PAM控制到各相电流检测PWM控制的改变,可将流向各相的电流绘制成正弦波状。电流控制实现数字化,利用高性能CPU执行计算处理。因此,在全速度范围内实现微步驱动,抗振特性显著提升。同时,通过将大部分模拟电路数字化并集成到CPU中,大幅减少元件数量,实现了驱动器的小型化。
原有产品(总电流检测PAM控制)
1个电流传感器检测5相电动机的电流。与PAM方法结合提供恒定电流控制,使5相的平均电流保持恒定。电动机电流呈梯形波形。
RKⅡ系列(各相电流检测PWM控制)
5个电流传感器检测5相电动机的电流。与PWM方式结合的恒定电流控制方式。可以控制电动机电流为正弦波形。
电动机电流波形(理论数据)
电动机电流从梯形波变为正弦波,可以降低振动。

高效电动机
改进了定子和转子的电磁钢板的材质、厚度、缔结方法等,降低了电机旋转时损耗的主要原因铁损。结果,成功地大幅降低了耗电量和发热。
