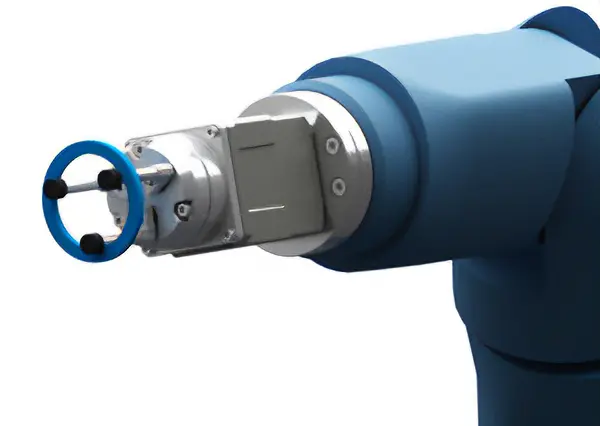
电动夹爪 EH系列 3指型

特征
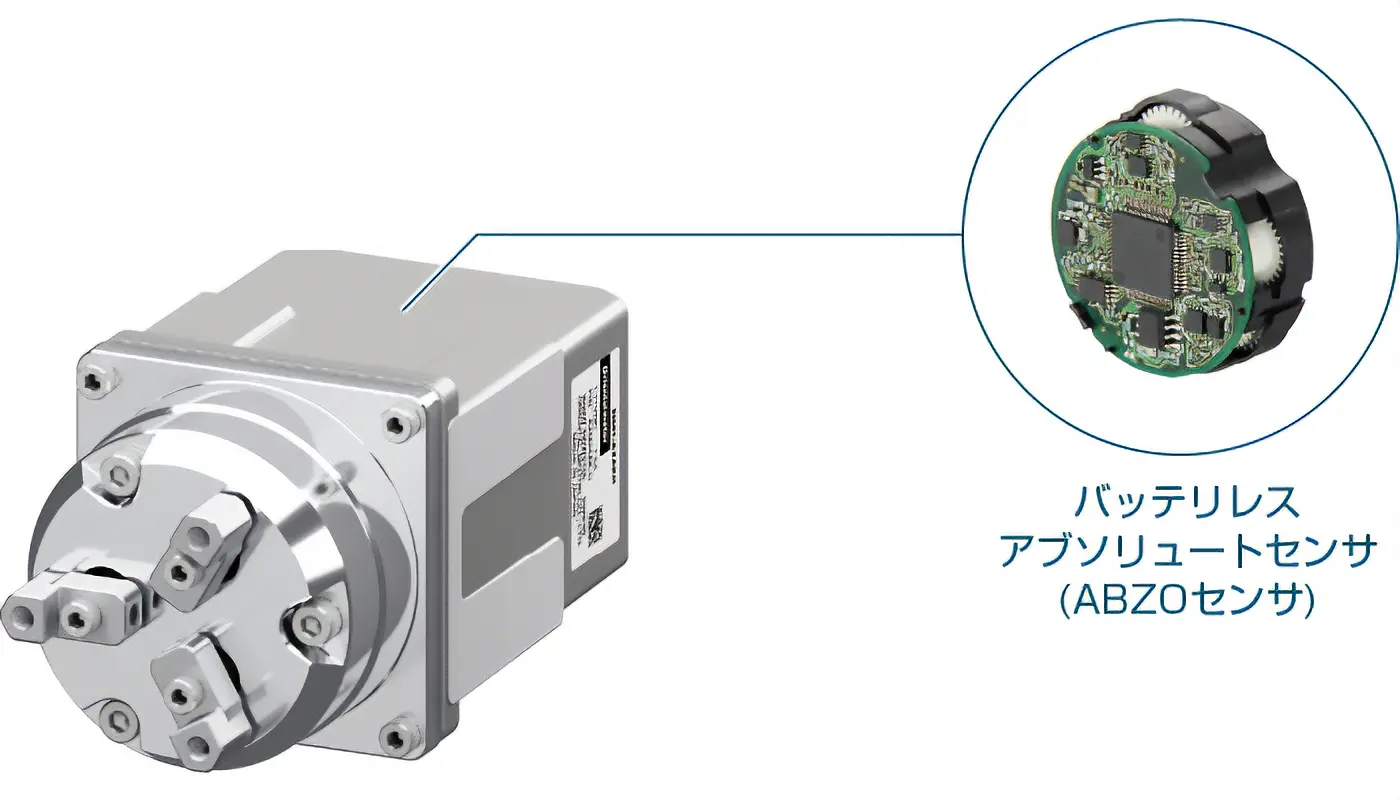
搭载 αSTEP AZ系列驱动电动机
- 内置免电池绝对式编码器,无需外部传感器即可实现实时监控电动机位置信息
- 闭环控制实现高可靠性
- 高效率化,降低电动机发热,且节能
| 3指 | |||
|---|---|---|---|
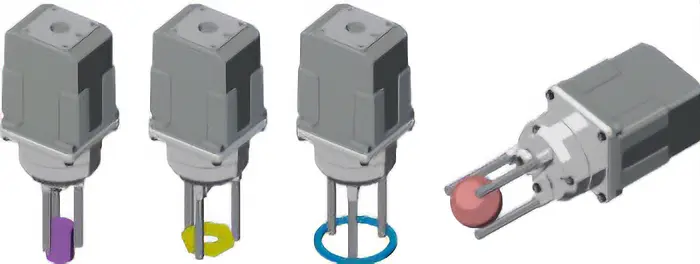
| 适合夹持的工作物形状 |
|
||
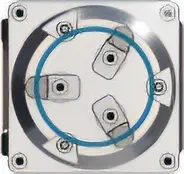
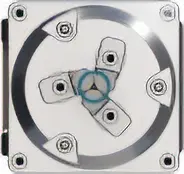
| 可动范围 |

|

|
|
|
开时: P.C.D.Φ30.9mm |
闭时: P.C.D.Φ7mm |
||
|
|
|
|
|
开度: P.C.D.Φ23.9mm |
|||
| 最大夹持力[N] | 50 | ||
| 容许轴向负载[N] | 15 | ||
| 质量[kg] |
0.38(带安装护盖) 0.28(不带安装护盖) |
||
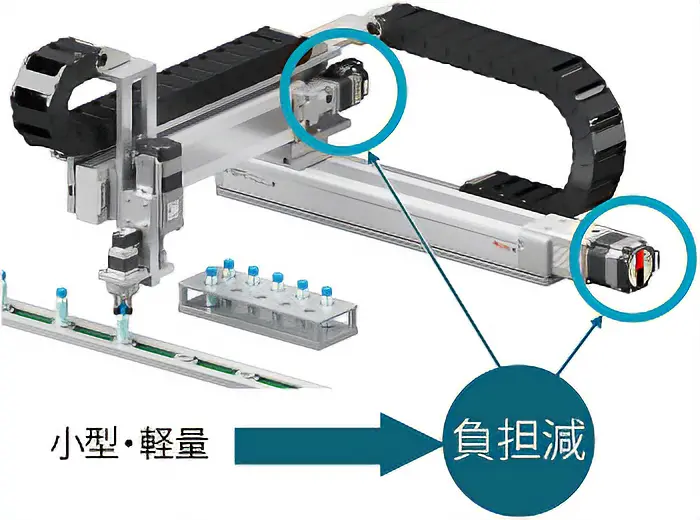
应用实例
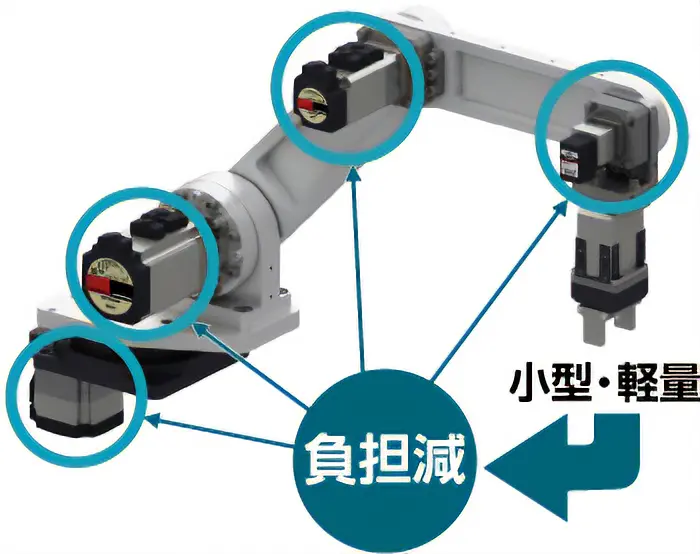
减轻各关节的负担,为机器人整体的小型化、降低成本做出贡献
末端执行器越小、越轻,就越能减轻各关节的负担,为机器人整体的小型化、降低成本做出贡献。
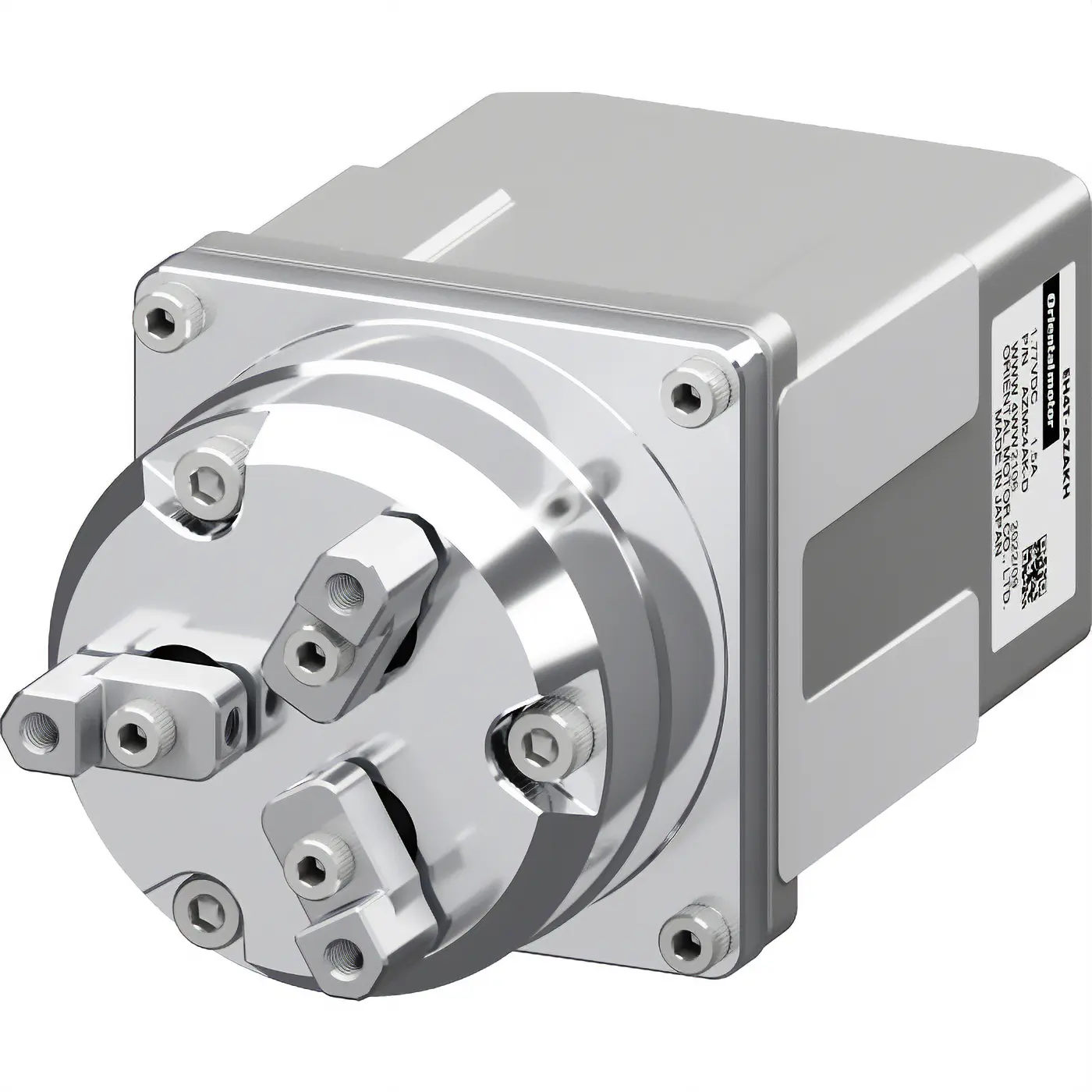
| EH4T-AZAKH |
|---|
|
| W48.5mm×D98mm×H46mm |
| 质量 : 380g |
EH系列可通过法兰盘连接到市售工业机器人(协作机器人)上。
法兰盘分为末端执行器侧、机器人侧的两片组。
机器人侧的法兰盘是符合ISO9409-1(JIS B 8436)的形状。

-
末端执行器侧 -
机器人侧 -
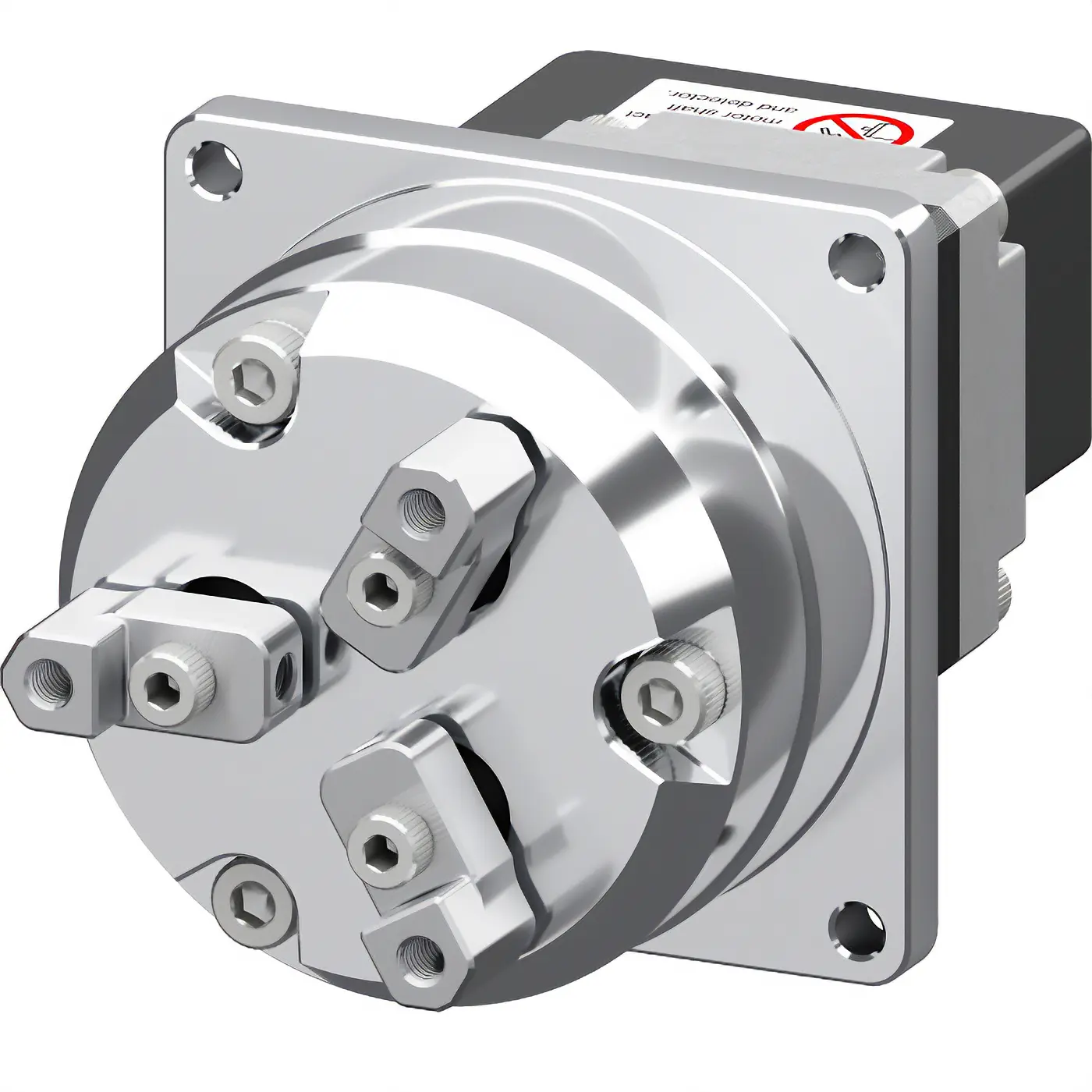
无安装护盖,具有设计的高自由度·轻量化
我们为您准备了可灵活适配客户自主设计的直交轴机器人末端等安装需求的法兰盘安装系列。
| EH4T-AZAK |
|---|
|
| W47mm×D90.5mm×H46mm |
| 质量 : 280g |
种类
「电动夹爪」、「驱动器」、「连接电缆线/可动连接电缆线」可单独购买。也可以组合购买。
电动夹爪
| 最大夹持力 | 夹持径※1※2 | 尺寸 | 质量 | |
|---|---|---|---|---|
|
|
50N |
夹持物的外径 φ2~φ24mm 夹持物的内径 φ14~φ36mm |
W48.5mm × D98mm × H46mm | 380g |
|
|
W47mm × D90.5mm × H46mm | 280g |
-
※1
-
该值是考虑了夹持物的直径(D)相对于约0.5mm(最小值)的间隙。
-
※2
-
夹具的直径(d)为φ6mm的情况。
驱动器
| 接口 | 电源输入 | ||
|---|---|---|---|
|
|
内置定位功能(Modbus对应) | DC24V | |
| 带RS-485通信的脉冲序列输入 | |||
| 脉冲序列输入 | |||
|
|
EtherCAT对应 |
|
|
| EtherNet/IP™对应 |
|
||
| PROFINET对应 |
|
||

|
EtherCAT对应 |
|
|
| EtherNet/IP™对应 |
|
||
| PROFINET对应 |
|
||
| 内置定位功能(Modbus对应) | |||
| 带RS-485通信的脉冲序列输入 | |||
连接电缆线/可动连接电缆线
- 从电动机出来的电动机电缆线不能直接连接到驱动器。请一并考虑连接电缆线。
- 当电缆线需要弯曲时,请使用可动连接电缆线。
| 长度[m] | |
|---|---|
|
|
0.5 ~ 20 |
- ※ EtherCAT®是Beckhoff Automation GmbH(德国)授权的专利技术及注册商标。
- ※ EtherNet/IP™是ODVA的商标。
- ※ PROFINET是PROFIBUS Nutzerorganisation e.V.(PNO)的商标及注册商标。
- ※ Modbus(RTU)是Schneider Automation Inc. 的注册商标。